
资料下载


国际象棋机器人开源分享
王兰
分享资料个
描述
更新2019中美青年创客大赛
思路介绍:
国际象棋机器人是一种能够与真实玩家实时对弈的机器人。使用电磁铁将棋子从棋盘下方自动移动,电磁体通过 XY 工作台在棋盘周围移动。
它是一个自动化的棋盘,通过图像处理识别玩家的移动,并通过国际象棋引擎找到一个棋子的移动,并在 Arduino 和 Raspberry pi 的帮助下移动,它控制步进、伺服电机以做出正确的移动。
重要组成部分:
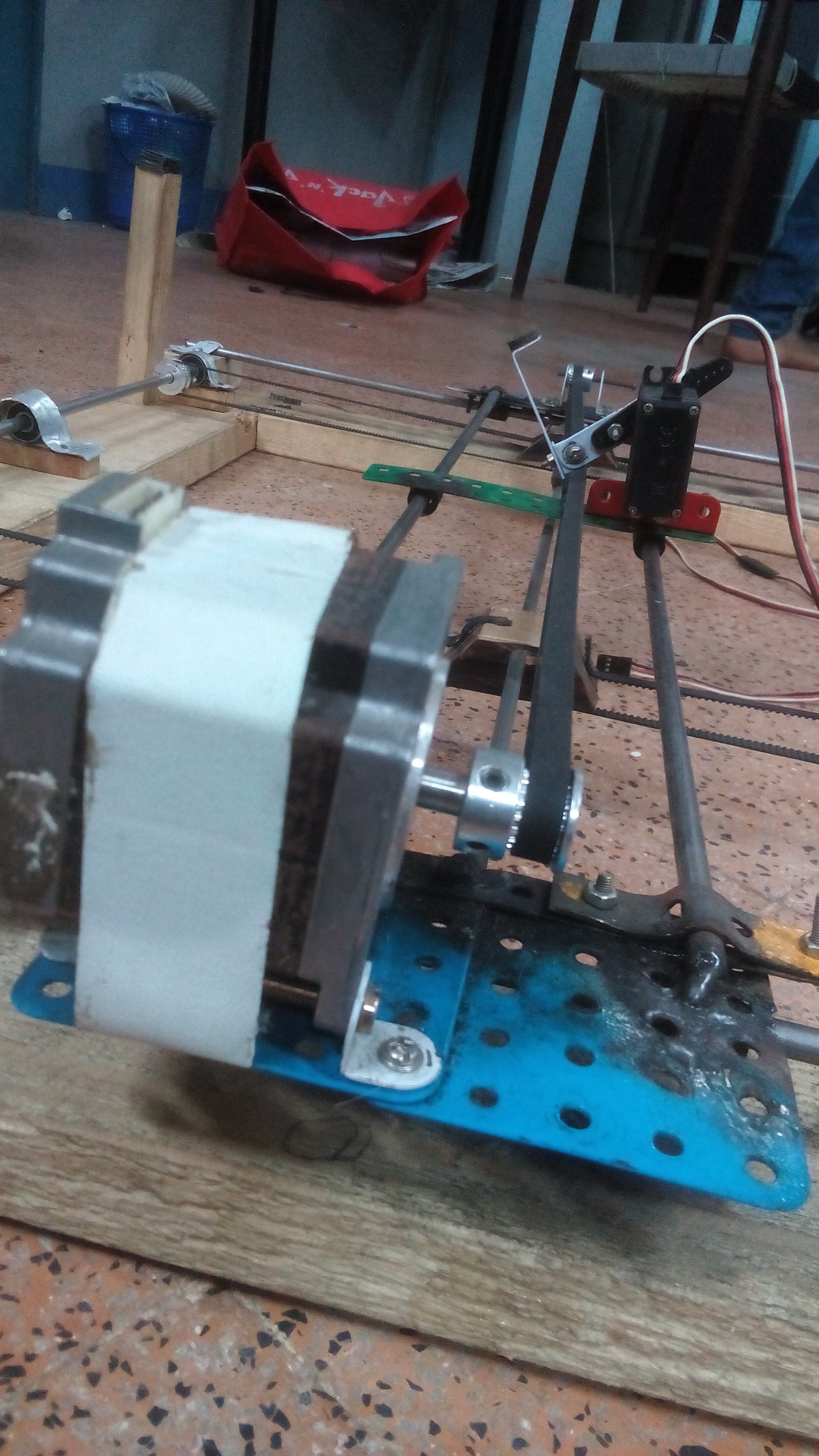
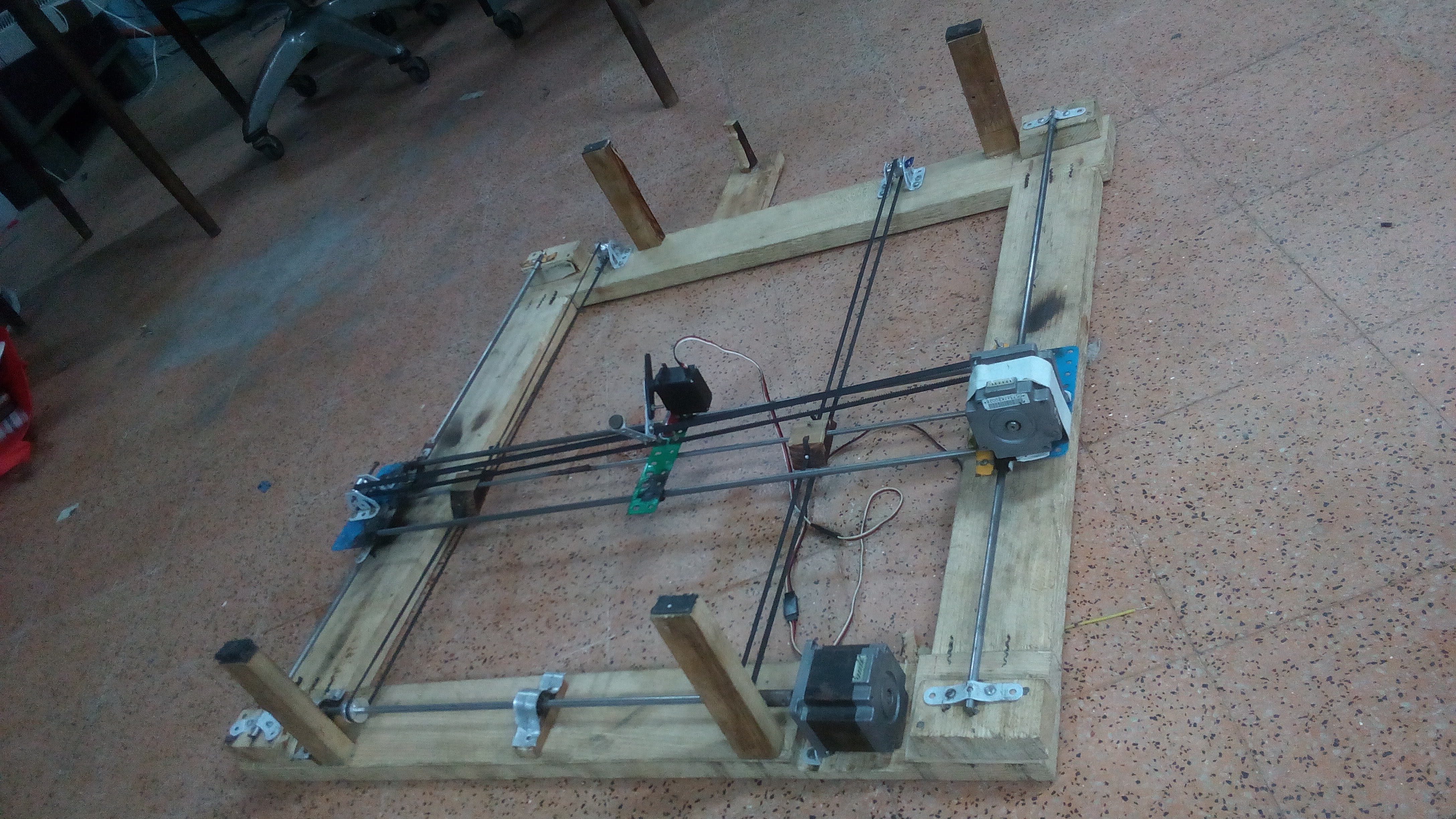
xy 绘图仪有一个双轴控制和一个特殊的机构来升高和降低磁铁支架。绘图仪的底座上有一个孔,磁铁支架穿过该孔。每个轴都使用单个步进电机和皮带提供动力。磁铁支架控制是使用伺服实现的。所有电子设备均由Arduino 和树莓派 控制,并由 12 伏墙上适配器供电

组装后,底座看起来像一个正方形,中间被切掉了。使用每件上的 4 个螺丝孔连接四个侧面。螺栓应该很容易滑过底座,通过拧紧螺母上的螺栓来实现张力,螺母应该松散地楔入每个支柱,如下图所示。
步进电机
对于我们的应用,所需的电机必须满足一定数量的要求:
- 电机应该可以疯狂转动(° 无限制)
- 电机应该是精确的(并且可以控制)
- 电机应该足够强大
步进电机是满足上述所有要求的电机。因此,这是为该项目选择的电机类型。
对于这个项目,在使用的地方回收了步进电机。不幸的是,这些电机没有提供这些电机的数据表,也无法在互联网上找到它们。给出的唯一信息是它们允许的最大电流。
为了知道如何连接电机,首先需要进行测试。两台电机均为6线电机。这些电机可以半接线或全接线在电路中。

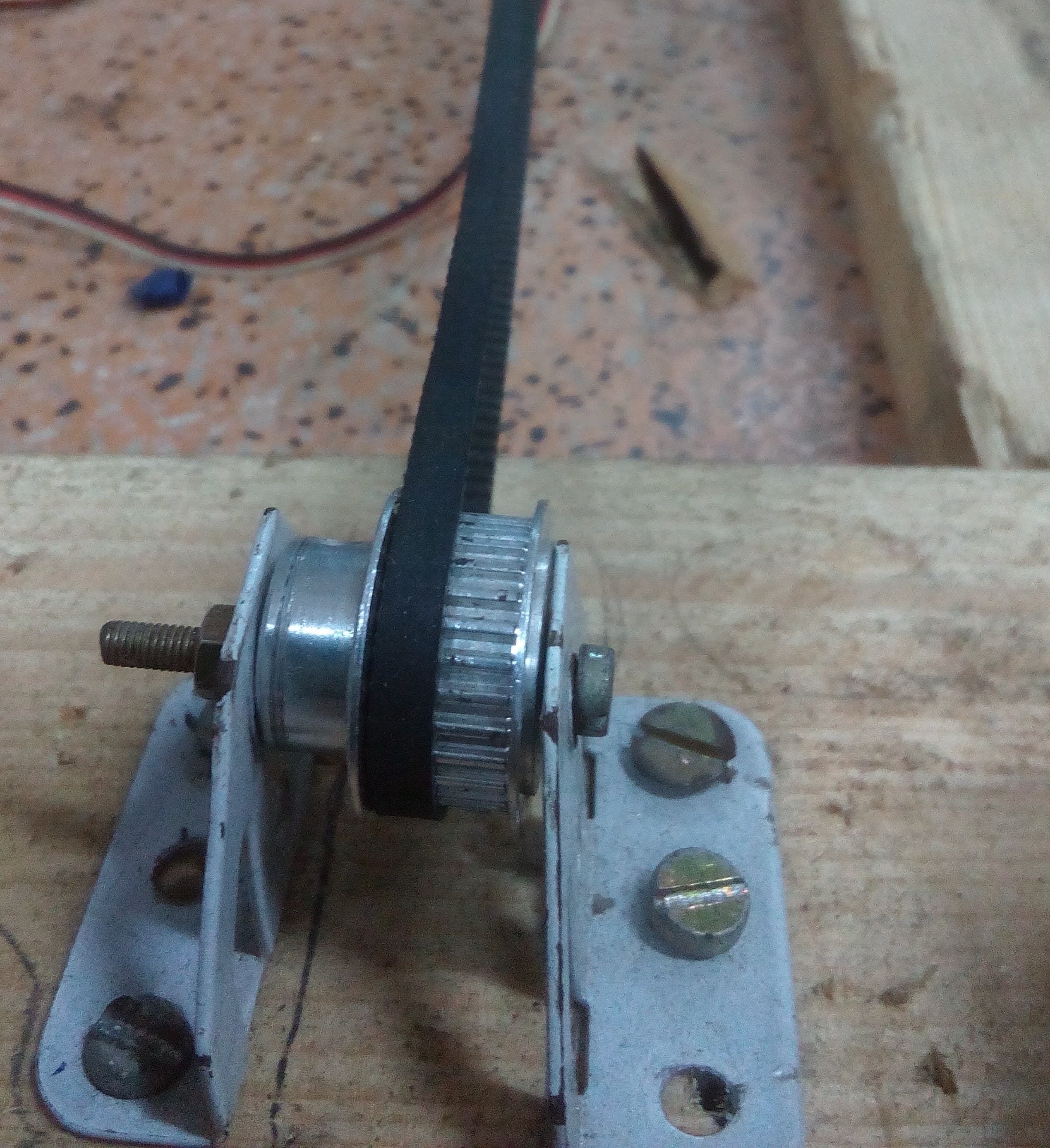
所用滑轮的类型取决于所用同步带的类型。同步带的主要要求是足够的长度。市场上提供的两种主要用于小型机械结构的同步带类型是 MXL 同步带和 GL2 同步带。现场提供的那些不方便关闭小型同步带。这就是我们决定使用 GL2 同步带的原因,这种同步带可以在 E BAY 等网站上以更优惠的价格和所需的长度购买。
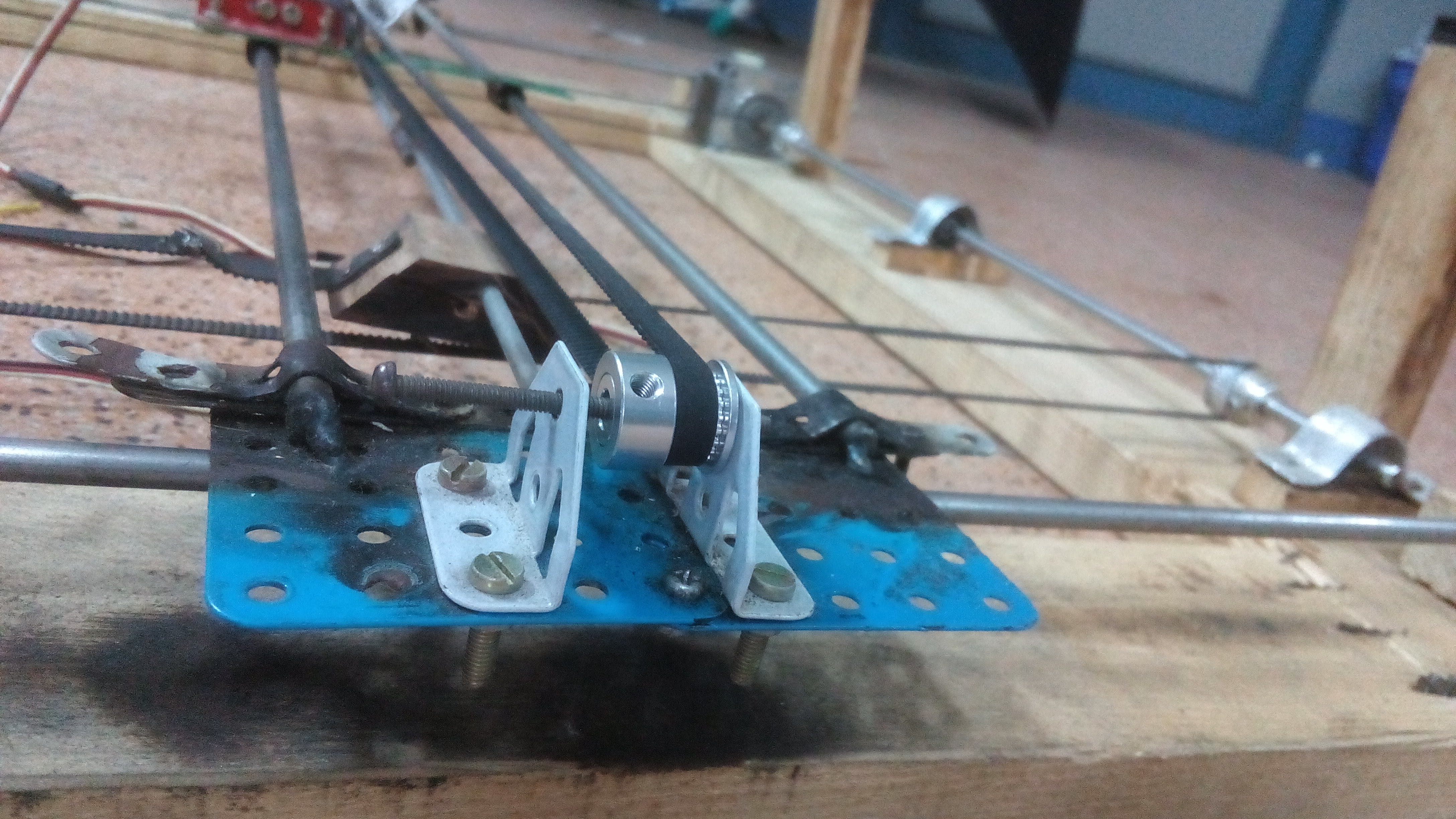
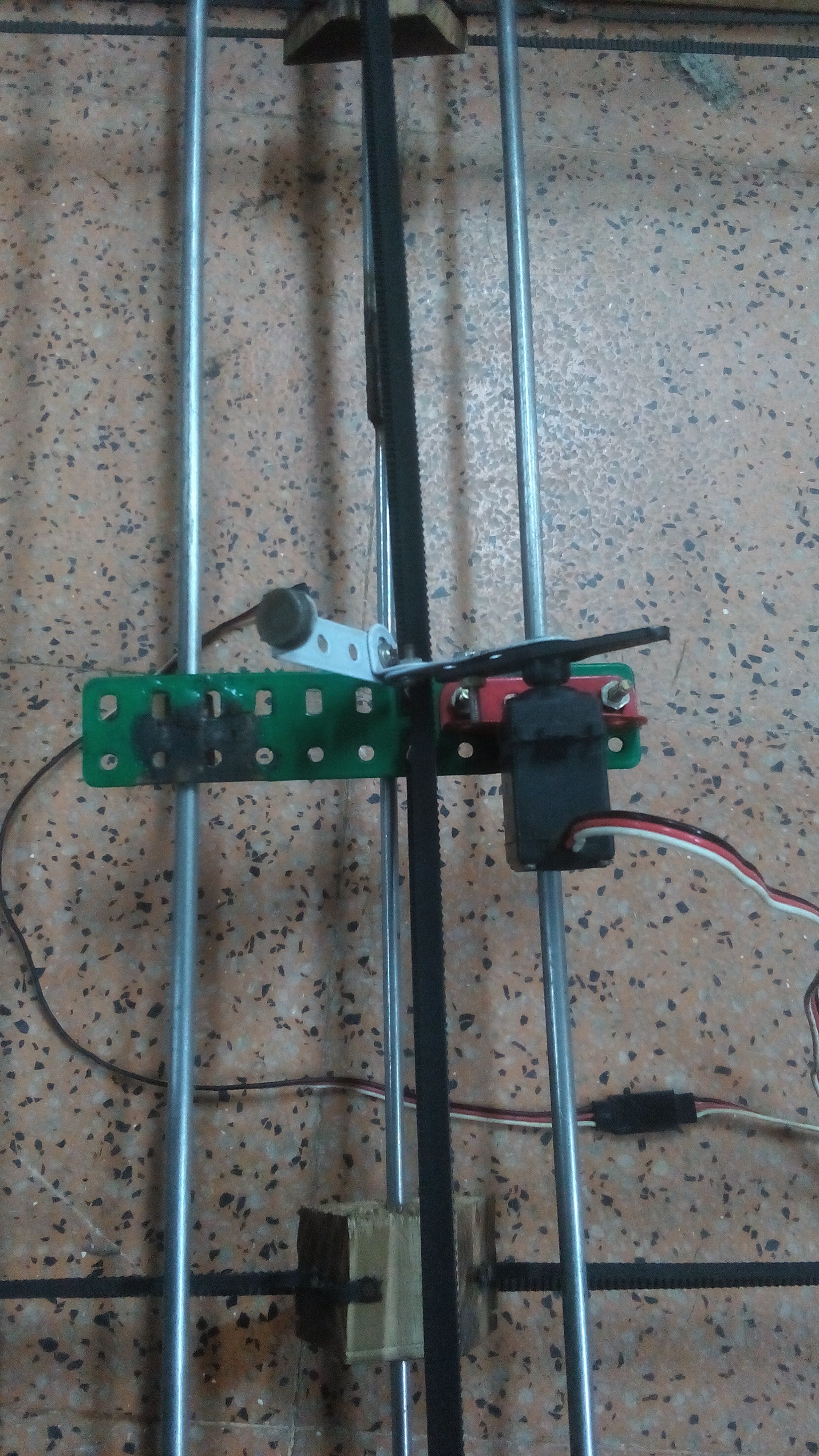
皮带和滑轮正好在棋盘表面下轻松移动。
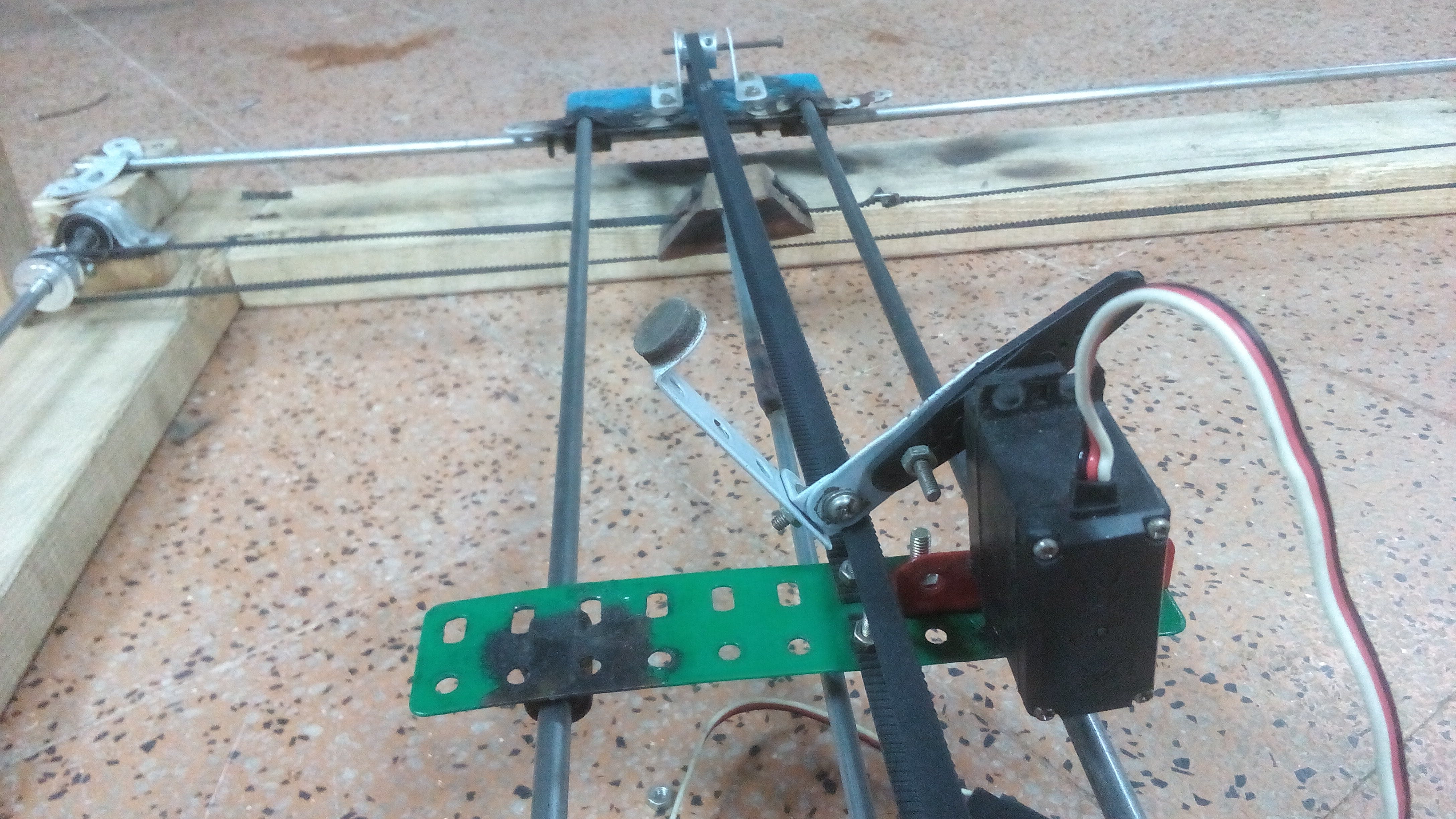
有助于夹在磁铁上的伺服运动的杆移动到所需位置并粘在硬币上并将硬币移动到相应的位置。

这是将铝板固定到位并将硬币放在上面的支架。





Alexa部分和图像处理部分:
现在我们已经完全完成了图像处理部分并且效果很好。我们现在正在尝试通过使用 Alexa 服务实现语音控制的国际象棋自动化。
希望这个项目能成为 Alexa 的绝妙技能组合!
我们使用的每个代码:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




