
资料下载


DIY TTR(乒乓球机器人)
郝埃连
分享资料个
描述
关于
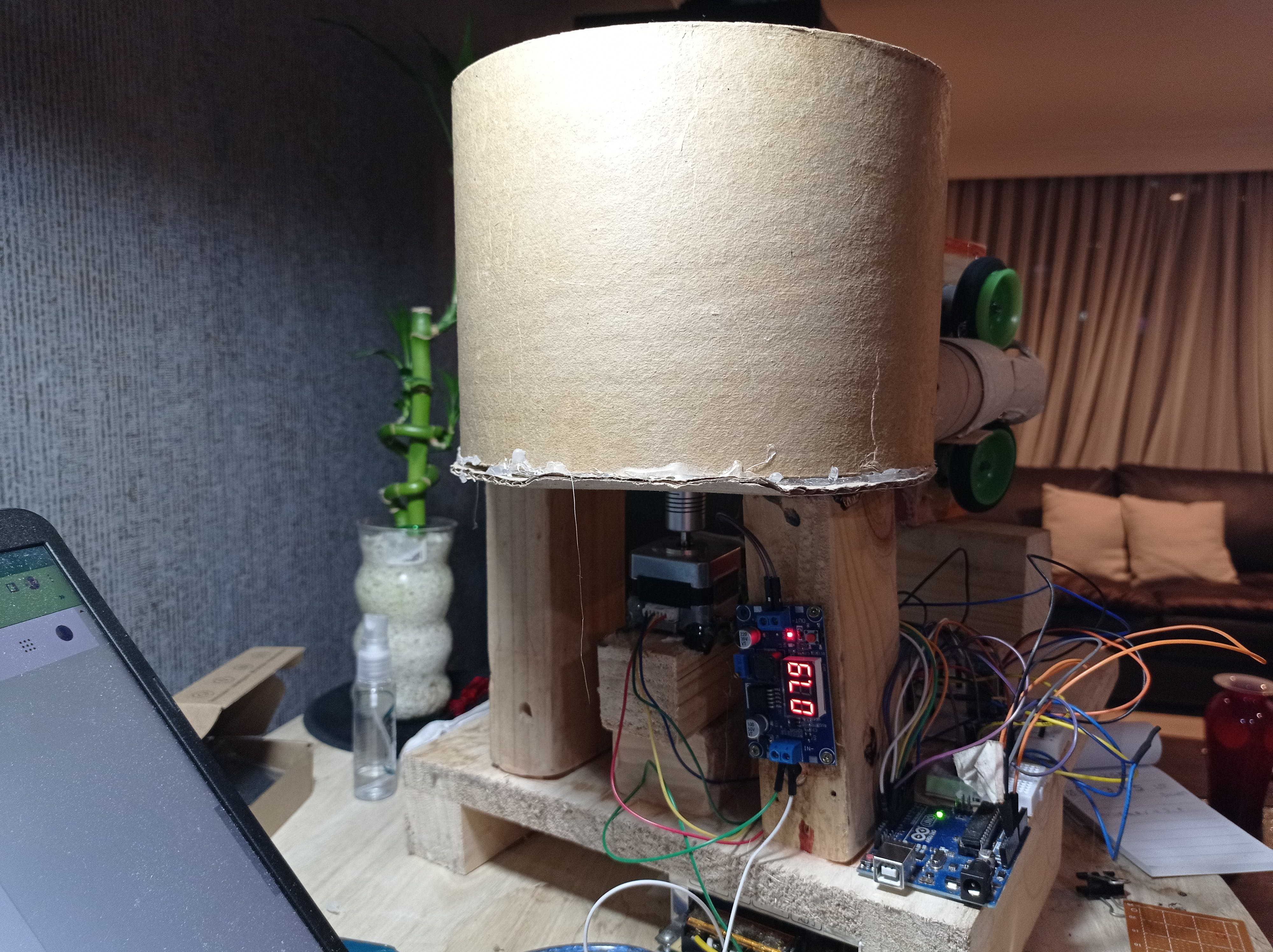
这个项目是关于在家里用硬纸板和木头制作的 TTR(乒乓球机器人),使用一些电子产品和 Arduino。
我为这次TTR DIY感到高兴,真的给了我很多乐趣。即使我一直在寻找很多机械,我也尝试使用 arduino 和电子产品以及一个由 MIT APP Inventor 开发的应用程序作为设计基础。
美学和装饰可能存在缺陷:到处都是大量的胶水,一些纸板被回收,胶带和木头上的碎片尽可能简单。材料成本估计为 60 美元。人工成本一如既往地难以估计,因为我喜欢作为业余爱好者做项目。
脚步
第 1 步:调查、检查互联网上可用的许多其他 TTR 模型以建立设计概念(设计基础)

第 2 步:确定供球器的位置作为设计的中心 - 可选择步进电机或带齿轮的电机。经过检查,我决定使用 stepper 来简化开发中的控制(它并不像我一开始想的那样真实)。
第三步:定义出口管段位置和左/右/中移动能力,请谨慎选择此位置,因为切线对于避免球进料器电机卡球和过载非常重要。在这种情况下,供料器的出口孔不正确,这对步进电机的扭矩要求过大,导致卡球。
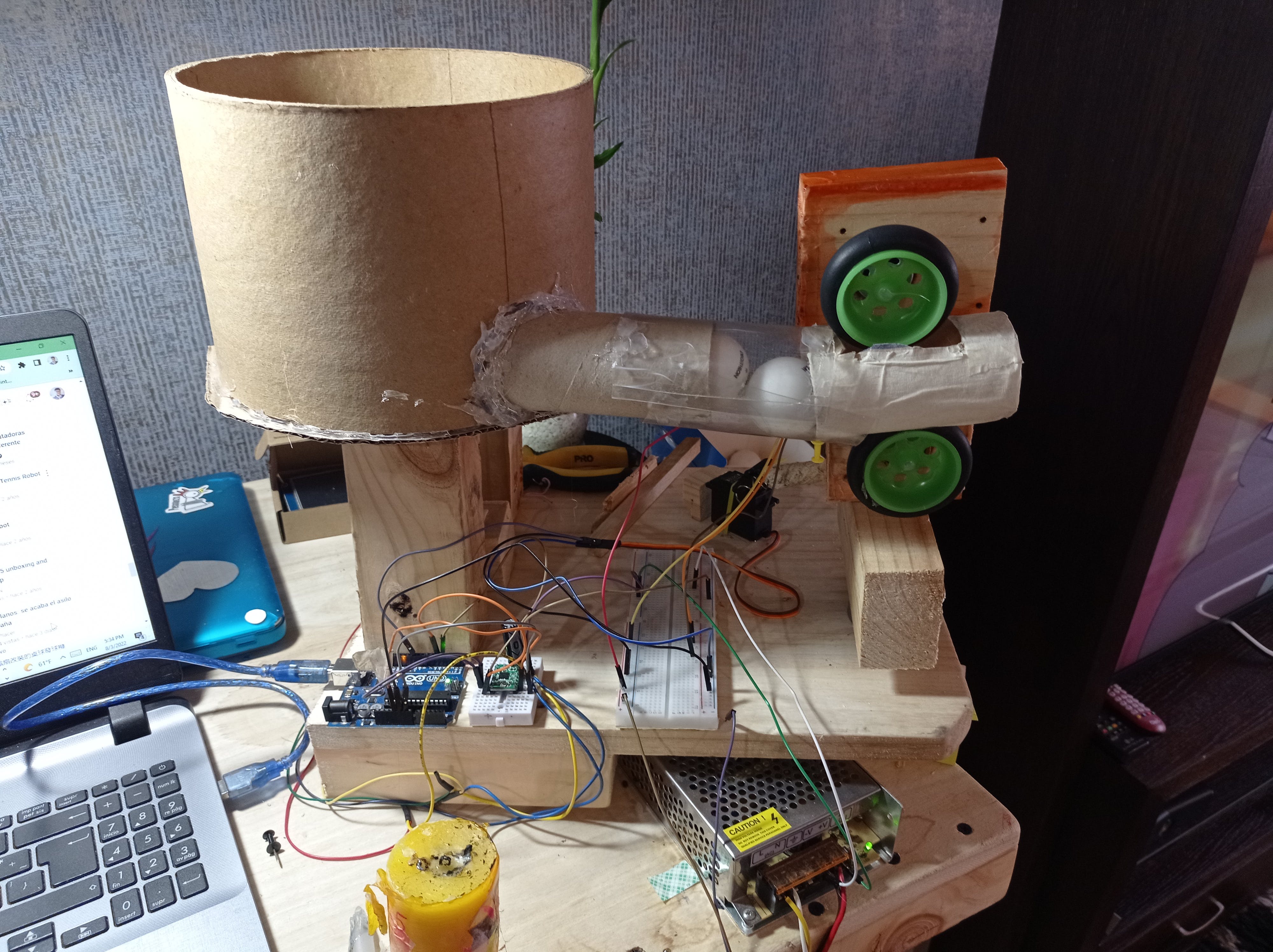
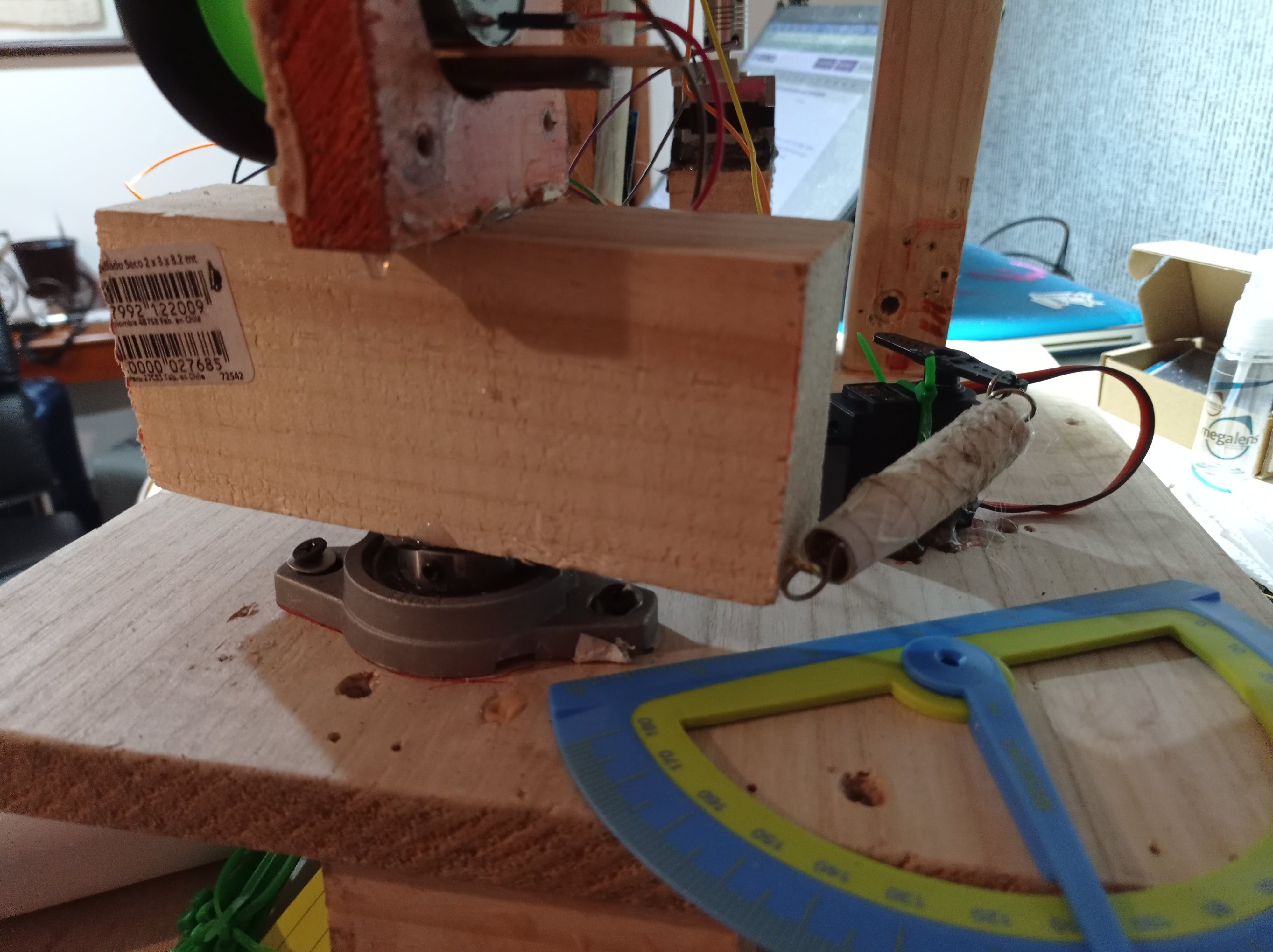
第 4 步:定义移动截面风管的策略,以获得不同方向的球。球的宽输出角度将为我们提供很多选择来玩这个 TTR。然而,存在受工作台尺寸和机器人位置限制的角度限制。
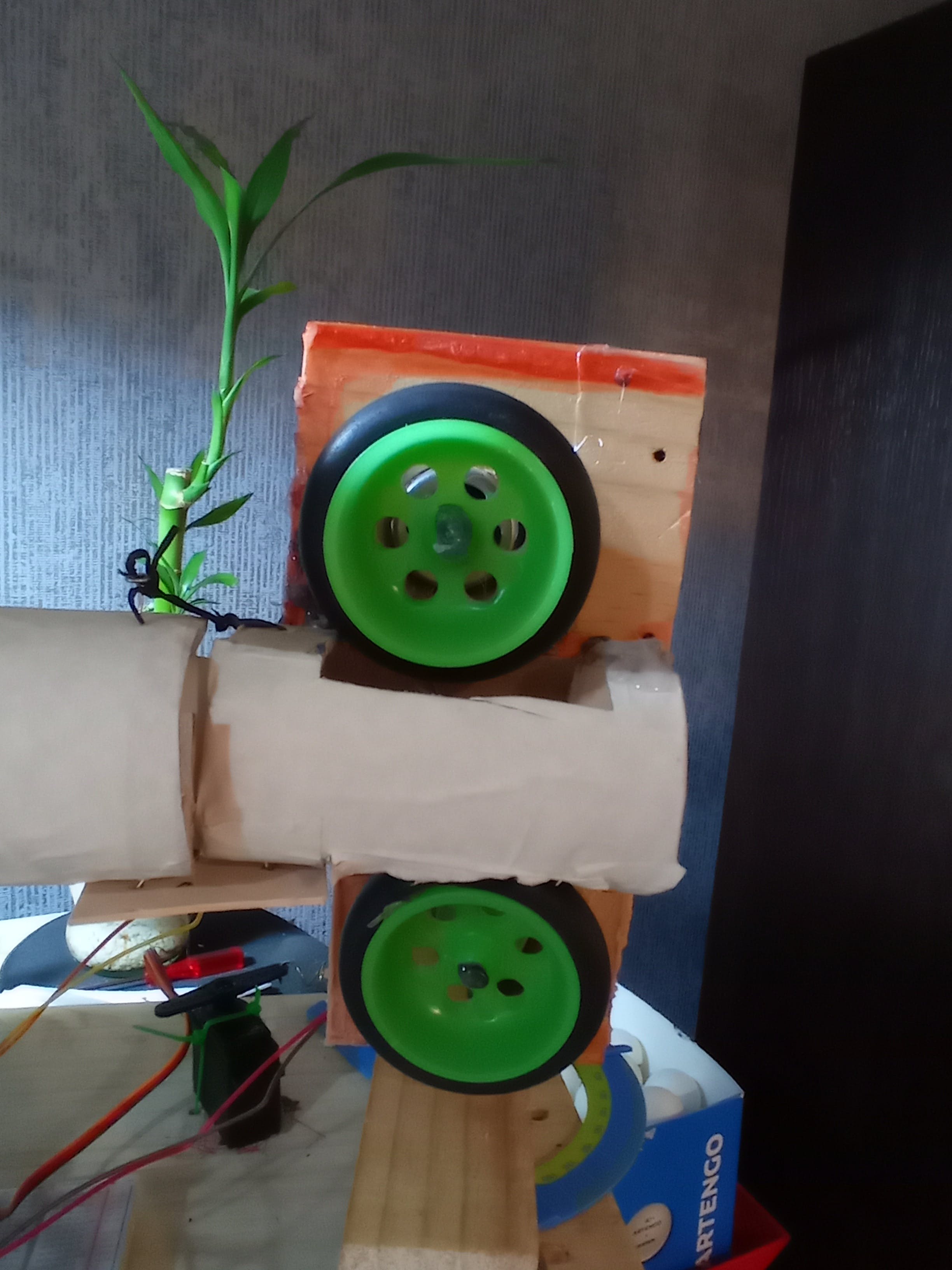
第 5 步:定义电机位置以产生旋转效果并发射球
第 6 步:电子产品
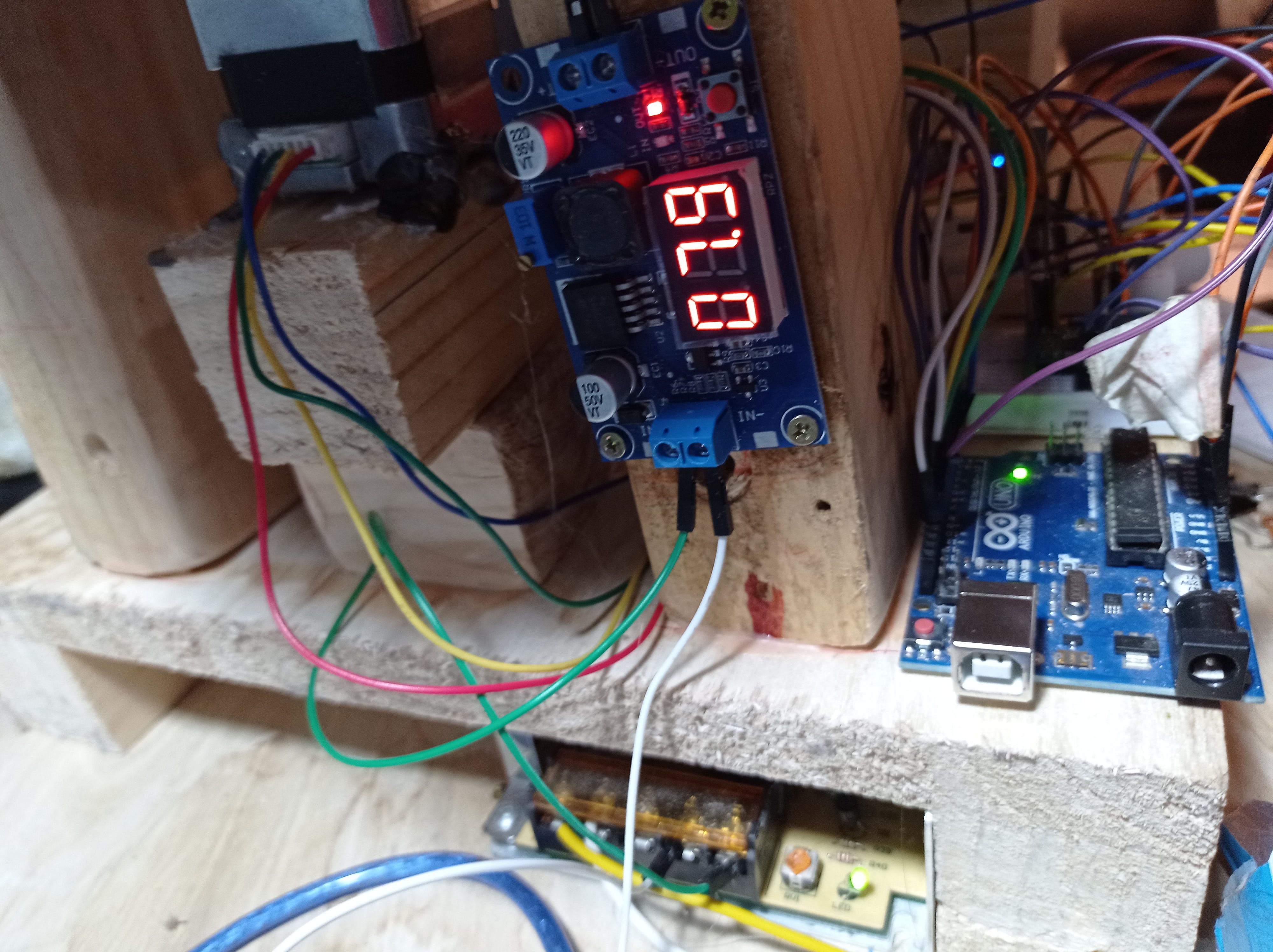
。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





