
资料下载


×
柔性关节机械人的研究现状与模型的建立及技术的实现
消耗积分:0 |
格式:rar |
大小:0.1 MB |
2017-09-16
分享资料个
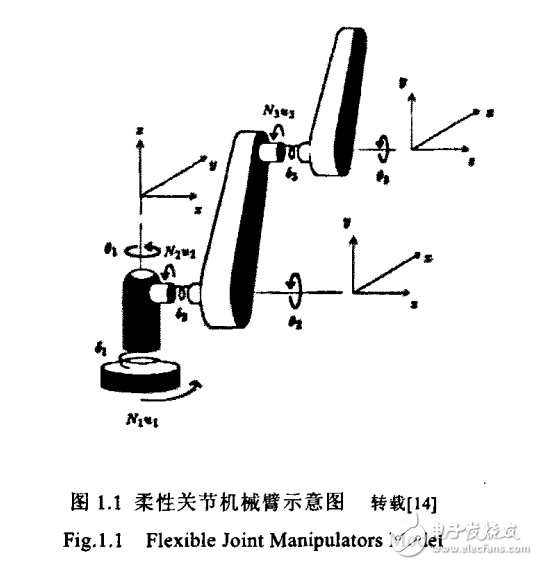
柔性关节机械人的研究状况柔性机器人包括杆件的柔性和关节的柔性。本文主要研究柔性关节机械臂的控制器设计。关节的柔性是指传动机构和关节转轴的扭曲变形,如图1所示。一般关节的连接可以用弹簧或者其他具有弹性的物质作为柔性连接物。
关节的柔性对系统的性能优化有很大的影响,通常用集中参数模型描述。与刚性机器人模型相比较,柔性关节机器人在建模和控制方面更加困难。首先驱动电机的转角不再恒等于连接杆件的转角,结果使得建立动态模型更加复杂;其次没有合适的控制,将会产生振动,影响系统的工作。机器人的动力学模型存在非线性和不确定因素,这些因素包括未知的系统参数 (如摩擦力)、非线性动态持性,以及环境因素(如负载变动和其他扰动)等,如果考虑到动态过程中不确定性,这将使控制器设计变得更加复杂。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






