
资料下载


使用SimMechanics实现六自由度的机械臂仿真研究
陈柏平
分享资料个
运动学和动力学分析对机械臂的研究具有很重要的作用。以往对机械臂的研究方法均需要建立复杂的数学模型和程序,而 SimMechanics 具有简单、快捷获取动态系统的模型的功能,并且系统建模方便直观,仿真功能强大,可以在模型中通过改变结构,优化系统参数,在仿真环境中分析结果。利用 SimMechanics 的上述优点,以工业六自由度机械臂 ER10 为研究对象,将 SolidWorks 建立好的机械臂 ER10 模型导入到 MATLAB/ SimMechanics 仿真平台中,生成对应的仿真模型,并且在运动仿真平台中,通过在机械臂模型添加末端位姿信号和各个关节信号 ( 角度函数,力矩值) ,全面地对机械臂进行运动学和动力学分析。
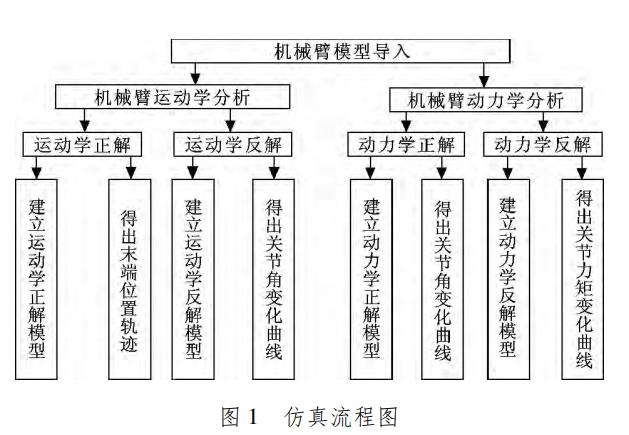
随着工业机械臂的发展,工业机械臂越来越广泛地被运用于工业各个领域。而机械臂本身是一个复杂的机电系统,设计出来的机械臂的机电系统,需要包含驱动力/力矩和驱动器。在设计机械臂控制系统时,我们需要获得每个部分的数学模型,每个电机的所需要扭矩和旋转角度,并预计机械臂的运动位置。现以六自由度工业机械臂 ER10 为研究对象,基于 MATLAB / SimMechanics 仿真平台进行仿真研究。ER10 机械臂末端负载为 10 kg,可以应用于喷釉,抛光打磨等行业。SimMechanics 仿真平台最大的特点是: 不需要去建立机构运动的数学模型和编制复杂程序; 系统建模方便直观,仿真功能强大; 可以通过改变结构,优化系统参数,在仿真软件环境中分析结果。这些特点大大减轻建立机构运动仿真模型这一过程的工作量,研究机械臂时可以通过这种简单、快捷的方法来获取机械臂的动态系统的模型。SimMechanics 包含一个 模 块 库 和 特 殊 的 仿 真 接 口 ( 传 感 器 和 驱 动块) ,这些 模 块 将 SimMechanics 模 块 和 Simulink 环境相衔接。文中将六自由度机械臂三维模型导入至 SimMechanics 仿真平台中,生成对应的仿真模型,并在仿真模型的关节上添加关节角度信号,进行机械臂运动学正解分析; 添加末端位姿信号,进行机械臂运动学反解分析; 添加关节力矩和末端位姿信号,进行机械臂动力学正解分析; 添加关节角度信号,进行机械臂动力学反解分析。仿 真 流 程 图 如 图 1 所示。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




