
资料下载


×
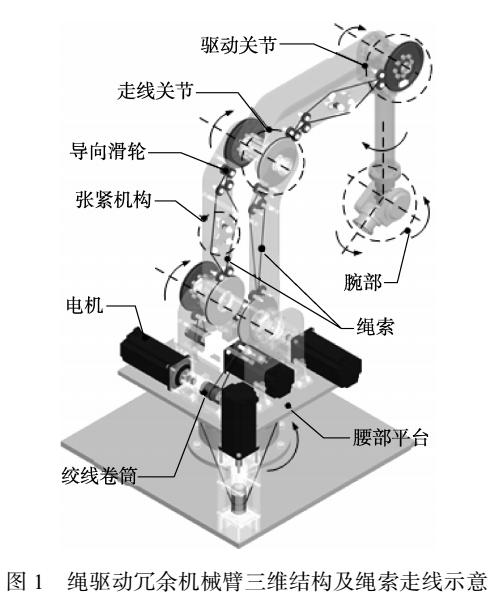
一种新型7自由度冗余绳驱动机械臂
消耗积分:2 |
格式:rar |
大小:1.43 MB |
2018-02-27
分享资料个
针对传统机械臂负载白重比小、臂身惯量大、人机交互安全性弱等问题,对绳驱动机械臂的结构、绳驱关节耦合、冗余运动学等方面进行了研究,创新设计了一种新型7自由度冗余绳驱动机械臂。采用绳索间接驱动前端4个关节自由度,作为位置控制;采用电机直接驱动腕部关节3个自由度,作为姿态控制。利用绳索将驱动力从基座电机传递至机械臂关节处,实现驱动机构后置;对绳驱关节耦合问题进行分析,建立了电机一关节耦合映射关系;利用位姿分离方式,结合加权最小范数法,进行机械臂逆运动学冗余位置求解。仿真结果表明:耦合映射关系建立正确,冗余运动学求解准确高效,为绳驱机械臂结构优化、动力学建模奠定了基础。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





