
资料下载


无人机软件架构分析
分享资料个
AIAA的会议论文(Infotech@Aerospace 2012),从计算机角度阐述了无人机软件架构,由易科机器人实验室(ExBot.net)分享。
文献信息
文献:UAV Software Architecture
作者:Fred Briggs,Wyle Aerospace Group
翻译:Top Liu,ExBot易科机器人实验室创始人;飘摇尘,ExBot易科机器人实验室核心开发者,ExBot.net管理员
无人机软件架构
AIAA 2012-2539
本文探讨无人机(UAV)系统的软件架构,对无人机系统设计已发表的软件架构方面文 献按时间进行综述与探讨。主要关注指挥和控制软件,并讨论情报、监视和侦察软件架构的 差异,其目的是为了呈现无人机软件架构是如何演变到目前状态。包括从技术软件架构规则 的早期发展到当前无人机软件在互操作性、通用性、视频压缩技术等方面问题,例如参考文献《软件架构:一门新兴学科的展望》,Garlan, D. and Shaw, M. (1996)1;《战场中的猛禽、 捕食者、掠食者及美国最新无人机》Yenne, W. (2010)2;《动态系统的软件使能控制和信息技 术》Samad, T. and Bala, G. (2003)3;《自主无人机实验的分布式架构》Doherty, P., Haslum P.,Heintz, F., Merz, T., Nyblom, P., Persson, T., and Wingman, B., (2004)4;《无人机智能系统软 件》Sinsley, G., Long, L., Niessner, A., and Horn, J.(2008)5以及《无人旋翼机系统》Cai, G., Chen, B., and Lee, T. (2011)6。研究比较了当前无人机开放式软件架构程序及其平台如捕食者、全球 鹰、飞马。完整的参考文献见附录A。
1 简介
“架构可定义为组件的结构及它们之间的关系,以及规范其设计和后续进化的原则和指南。简言之,架构是构造与集成软件密集型系统的深层次设计7“。也可称其为如何实施解决 方案的一个策略性设计(例如基于组件的工程标准、安全)和解决方案做什么的功能性设计(如算法、设计模式、底层实现)。
1996 年 Garlan 和 Shaw 在《软件架构:一门新兴学科的展望》1 中写到架构问题包括:系统组件构成的组织、全局控制结构、通信协议、同步和数据访问等。他们研究了软件开发者常用的系统组织模式,包括数据流系统、调用及返回系统、虚拟机、以数据为中心的系统(数据库)、分布式进程和特定领域的软件架构。针对给定问题或领域,确定最优秀的架构是一个永恒的挑战。Garlan 和 Shaw 展示了如何构造一个可变架构的设计空间,以及如何建立设计原则来根据功能需求选择应用系统。
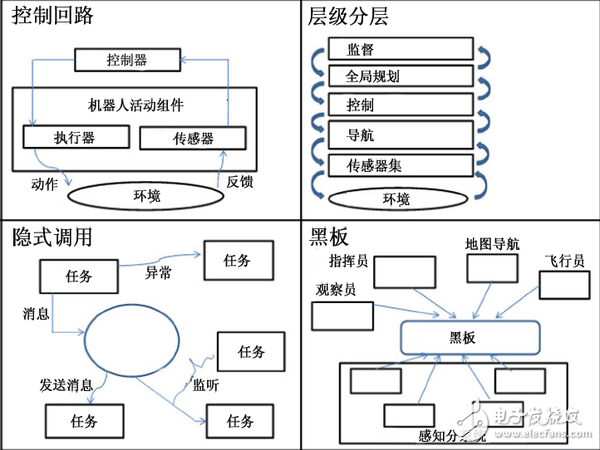
Garlan 和 Shaw 列出了移动机器人的基本设计需求,如:(1)慎思规划和反应式行为;(2)容许不确定性;(3)考虑危险;(4)灵活性强。针对这些要求,他们评估了四种 用于移动机器人的架构,包括控制回路(control loop)、分层(layers)、隐式调用(implicit invocation)、黑板(blackboard),如图 1 所示。闭环控制解决方案推荐用于不处理复杂外部事件的简单机器人系统。分层构架能很好实现构件的组织,但是在实时环境中处理外部事件时其反应过慢。第三个 解决方案隐式调用围绕事件处理实现,用于任务控制架构(TCA)。
推荐 TCA 用于较复杂的机器人项目,并已在众多移动机器人上得到应用。TCA 为性能、容 错、安全性和并发性提供了一套完整的任务协调机制和规定。TCA 架构由位于同一层次的任务或任务树组成。在运行过程中任务树会作很多动态调整以适应环境条件和机器人状态的改变。第四种解决方案黑板构架由一个中心黑板或 数据库构成,负责接收和发送命令、共享数据和解决冲突。它支持并发性且有异常处理程序来处理不确定性。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




