
资料下载


×
基于simulink的PID控制器设计与仿真
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-10-20
分享资料个
随着电力行业的快速发展,逆变器的应用越来越广泛,逆变器的好坏会直接影响整个系统的逆变性能和带载能力。逆变器的控制目标是提高逆变器输出电压的稳态和动态性能,稳态性能主要是指输出电压的稳态精度和提高带不平衡负载的能力;动态性能主要是指输出电压的THD(Total Hannonic Distortion)和负载突变时的动态响应水平。在这些指标中对输出电压的THD要求比较高,对于三相逆变器,一般要求阻性负载满载时THD小于2%,非线性满载(整流性负载)的THD小于5%.这些指标与逆变器的控制策略息息相关。文中主要介绍如何建立电压双环SPWM逆变器的数学模型,并采用电压有效值外环和电压瞬时值内环进行控制。针对UPS单模块10 kVA单相电压型SPWM逆变器进行建模仿真。通过仿真,验证了控制思路的正确性以及存该控制策略下的逆变器所具有的鲁棒性强,动态响应快,THD低等优点。并以仿真为先导,将其思想移植到具体开发中,达到预期效果。
1 三电平逆变器单相控制模型的建立
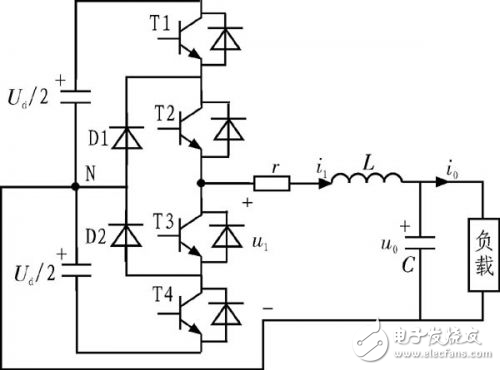
带LC滤波器的单相逆变器的主电路结构如图1所示。图1中L为输出滤波电感,C为滤波电容,T1,T2,T3,T4分别是用来驱动IGBT的三电平的SPWM波,U0为输出负载两端的电压。在建立控制系统的仿真模型时,需要采集负载两端的电压与实际要求的电乐值做比较,然后通过调节器可以得到所需要调节的值。在此仿真模型中,驱动波形采用的是三电平的SPWM波形,具体的产生原理在这不做详细描述。在Matlah的Simlink库中SPWM波的产生如图2所示,这里调制比设为0.8.
1 三电平逆变器单相控制模型的建立
带LC滤波器的单相逆变器的主电路结构如图1所示。图1中L为输出滤波电感,C为滤波电容,T1,T2,T3,T4分别是用来驱动IGBT的三电平的SPWM波,U0为输出负载两端的电压。在建立控制系统的仿真模型时,需要采集负载两端的电压与实际要求的电乐值做比较,然后通过调节器可以得到所需要调节的值。在此仿真模型中,驱动波形采用的是三电平的SPWM波形,具体的产生原理在这不做详细描述。在Matlah的Simlink库中SPWM波的产生如图2所示,这里调制比设为0.8.

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





