
资料下载


×
CAN总线系统仿真模型及其通信控制协议的介绍
消耗积分:0 |
格式:rar |
大小:0.3 MB |
2017-10-21
分享资料个
控制器局域网(CAN) 属于现场总线的范畴,是一种有效支持分布式控制系统的串行通信网络。它是鼬由德国博世公司在20 世纪80 年代专门为汽车行业开发的一种串行通信总线。由于其通信速率高、工作可靠、调试方便、使用灵活和性价比高等优点,己经在汽车业、航空业、工业控制、安全防护等领域中得到了广泛应用,被公认为几种最有前途的总线之一,其协议也发展为重要的国际标准。
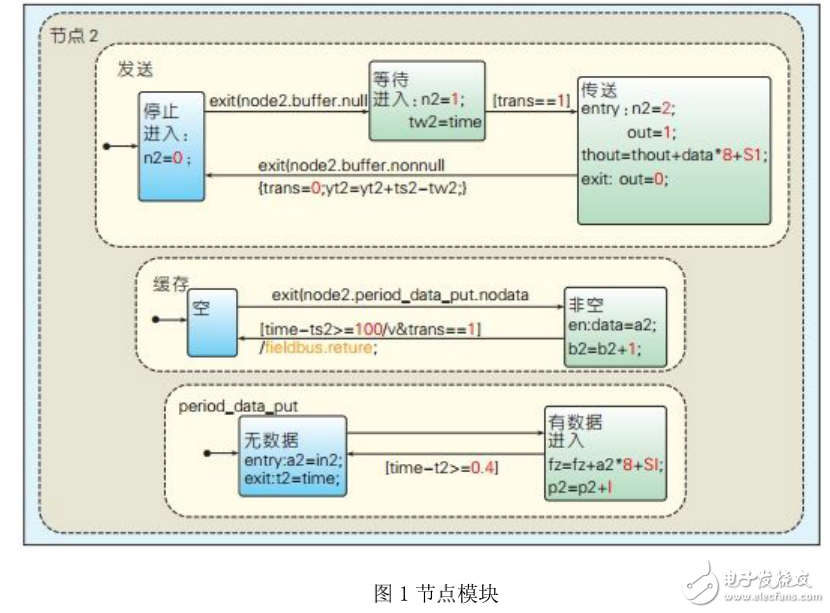
随着CAN 总线在各个行业和领域的广泛应用,其通信性能也越来越受到人们的关注。目前,已有很多学者对CAN 总线通信性能进行分析研究。文中在分析CAN 总线通信控制协议的基础上,在MATLAB/Sinul ink 软件Stateflow 仿真环境下,利用有限状态机理论对CAN 总线通信系统进行了形式化建模。通过此仿真模型,分析了CAN 总线通信系统中负载率的变化对网络吞吐量、平均信息时延、通信冲突率、网络利用率、网络效率以及负载完成率的影响。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




