
资料下载


×
并联机器人的少自由度并联机构设计
消耗积分:0 |
格式:rar |
大小:1 MB |
2017-10-23
分享资料个
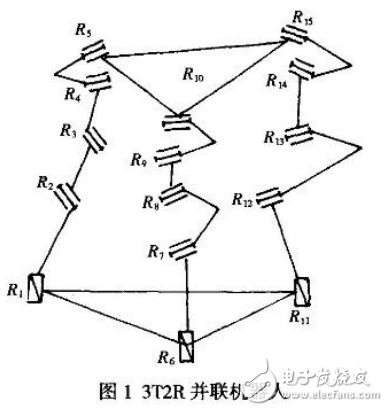
理想的少自由度并联机构的所有分支最好具有完全相同的结构,保持结构的对称,以满足各向同性的要求。以单开链支路为单元,提出了一种新型的对称的少自由度的并联机器人机构。研究结果表明,该机构的运动平台具有三维移动和两维转动的5 个自由度。
少自由度并联机器人机构其动平台的独立输出运动数小于6。近十多年来,该类机构成为研究的一个热点。这是由于少自由度并联机器人结构简单、造价低,具有良好的应用前最“。在许多场合,非期望输出运动为常量的欠秩并联机器人机构实用性较强,出现了不少新机型及专利。这些新机构可分为四类: 平面3-DOF 并联机器人机构叼球面3-DOF 并联机器人机构吲,三维移动并联机器人机构(4s,以及4-DOF 并联机器人机构尚。其中以三平移并联机器人机构研究得最多,5 自由度的并联机器人的研究还是不多,对称的就更少了。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




