
资料下载


×
基于磁传感器的PID控制自主飞行系统
消耗积分:1 |
格式:rar |
大小:0.71 MB |
2017-11-02
分享资料个
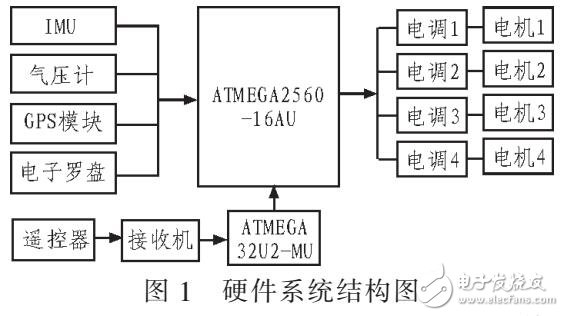
为实现四旋翼精确高效的自主飞行,提出一种基于磁传感器的串级PID控制自主飞行系统。该系统硬件平台采用CPS接收机提供经、纬度,磁传感器提供航向角;软件上采用串级PID控制,外环为位置导航级,内环为姿态控制级。首先根据四旋翼起始点位置与预置目标点的关系得到目标航向角和航线,同飞往目标点过程中的偏航角和偏航距作为外环PID控制输入量,得到姿态的参考值,然后经内环PID控制使系统能跟随参考姿态,实时修正航线,使四旋翼以近似直线的轨迹飞往目标点。该系统具有控制精确,计算量小,飞行路径简短,飞行稳定的特点。最终以自行搭建的四旋翼为平台,验证了该自主飞行控制方法的有效性。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





