
资料下载


×
室内移动机器人地图构建
消耗积分:2 |
格式:rar |
大小:22.40 MB |
2018-01-17
分享资料个
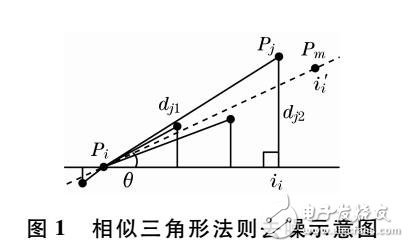
为使室内移动机器人更好地从充满噪声的2D激光测距仪数据中构建精准地图,提出一种基于相似三角形去噪法则的改进算法。利用分裂算法从预处理数据中提取线段集合,通过改进相似三角形去噪法则对每两分裂点间的数据点进行去噪,将去噪后的数据重新进行分裂,并对每两相邻分裂点间的扫描点进行最小二乘直线拟合。实验结果表明,该算法有效降低部分有效点被剔除的数量,精确度和假阳性指标优于相似三角形去噪法和传统分裂合并算法,同时避免线段合并过程,提高环境建模的鲁棒性和精准性。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





