
资料下载


×
嵌入式的智能搜救无人机飞控系统
消耗积分:3 |
格式:rar |
大小:0.55 MB |
2018-01-27
分享资料个
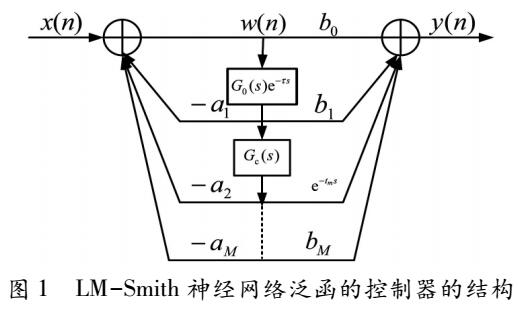
针对当前搜救无人机飞控系统控制性能差的问题,基于嵌入式平台进行了搜救无人机的飞控系统设计,以提高搜救无人机的飞行稳定性,并提出一种基于LM-Smith神经网络泛函的搜救无人机飞行控制算法。飞控系统设计主要包括控制算法设计和硬件模块设计两大部分,采用最小信息熵进行LM-Smith神经网络泛函加权,对被控对象进行模式识别和稳定性自适应修正,对飞行控制的位置偏移进行完全跟踪补偿,通过构建的LM - Smith神经网络泛函的控制器,获得渐进稳定收敛的飞行控制算法。以S3C2440A ARM9处理器作为控制核心和以Micr02440为核心主控板,基于嵌入式Linux系统加载控制程序,实现了控制系统改进设计。为验证飞控系统与控制算法的有效性和适用性,进行了性能测试与分析。测试结果表明,所构建的飞控系统在智能搜救无人机飞行控制中具有较高的轨迹跟踪控制精度,姿态稳定性和控制性能较好。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





