
资料下载


×
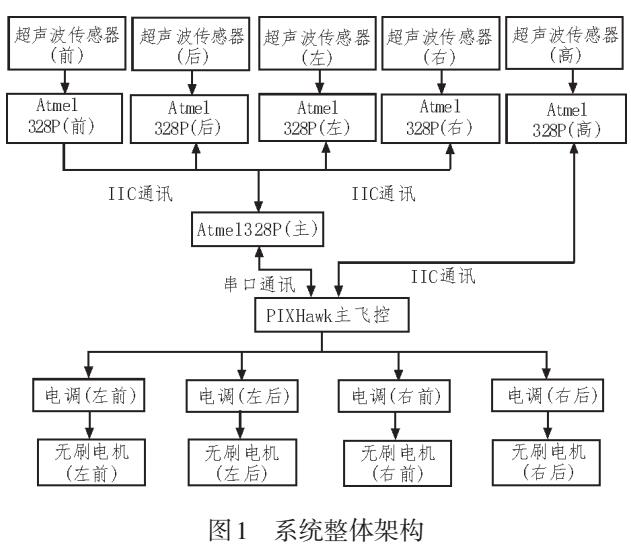
基于超声波的四旋翼室内定位方法
消耗积分:1 |
格式:rar |
大小:1.53 MB |
2018-04-03
分享资料个
近年来,四旋翼飞行器的应用与研究广泛受到关注,随着嵌入式处理器、微传感器技术和控制理论的发展和成熟,四旋翼飞行器逐步向高效、多功能化方向发展,广泛应用于军事、民用、以及科学研究等多个领域。与此同时,四旋翼飞行器在定位与控制方面也得到了很大发展,目前定位技术主要采用GPS、人工视觉、光流法和超声波等实现。GPS在四旋翼导航与定位方面应用已经相对成熟,但其主要用于室外,在室内应用时存在信号采集不稳定,定位不精确的情况。人工视觉的摄像头对室内光线的要求较高,当光线偏暗或明暗变化较快时,存在采不到数据或误采集情况;另一方面,摄像头采集的数据量巨大,运算处理时间较长,实时性得不到可靠保障。
近年来,使用光流法进行飞行导航定位和避障也成为小型飞行器研究领域的一个热点问题,但光流法算法复杂,对处理器运算速度要求较高,定位精度还不高。超声波技术具有不受室内光线影响、数据处理简单、测距精度高、成本低廉、方便应用等优点,在机器人测距与定位方面得到广泛应用。本文提J出一种将超声波传感器应用于四旋翼飞行器进行室内定位与运动控制的方案。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






