
资料下载


×
如何对模型智能车车运动速度和运动方向的闭环控制的详细概述
消耗积分:0 |
格式:pdf |
大小:2.06 MB |
2018-06-03
王仕敬
分享资料个
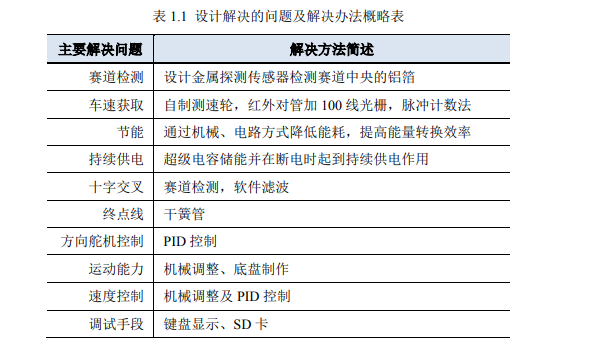
本文设计的智能车系统以 MK60DN512ZVLL10 微控制器为核心控制单元,使用金属铜导轮获取赛道上铝膜通有的 12V 直流电,自制质量较轻、灵活性较高、机械性能较强的车模,通过电感线圈检测赛道信息,提取铝膜位置,用于赛道识别;使用超级电容对采集到的电能进行存储和转换;通过光电编码器检测模型车的实时速度,使用 PID 控制算法调节驱动电机的转速和转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。为了提高模型车的速度和稳定性,使用键盘显示模块、MATLAB 仿真平台、上位机、键盘模块等调试工具,进行了大量硬件与软件测试。实验结果表明,该系统设计方案确实可行
本设计主要针对大赛规则以及赛题标准进行。首先,要求能够保持电轨车能够获取赛道铝膜上通有的 12V 直流电;其次,根据规则设计节能低功耗车模;同时还要通过金属探测传感器,获取赛道上铝箔的位置信息,用来循迹。最后根据大赛规则使电轨节能车在规定的赛道中跑完全程。对电轨节能车整体系统进行设计,包括机械、硬件电路以及程序设计。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 ggxxsxq
2018-06-04
0 回复 举报赞 收起回复
ggxxsxq
2018-06-04
0 回复 举报赞 收起回复
- 相关下载
- 相关文章






