
资料下载


使用PCL进行点云数据粗配准算法的研究资料分析
分享资料个
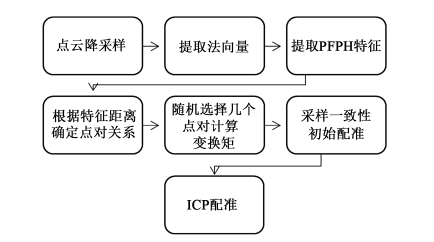
传统ICP算法精度受点云初始位姿影响较大,收敛速度慢,不能满足精细化点云建模的要求。基于此问题,通过基于快速点特征直方图的采样一致性配准方法进行粗配准。首先将两帧待配准点云进行体素滤波,其次进行表面法向量估计并计算关键点的PFPH特征,然后运用采样一致性算法得到最优变换,最后在此基础上再进行ICP配准。实验表明,该方法能有效改善配准精度和收敛速率。
三维点云建模所采集的数据不仅可以记录物体的空间信息,而且能够获取物体表面的几何信息,因此它已经成为近年来的研究热点。在实际扫描中,由于物体的复杂性、仪器设备等因素的影响,单视角扫描只能获得某个视角的数据,而此视角的数据坐标是基于当前的仪器坐标系的位对物体进行扫描,然后将不同方位下采集的数据统一到一个坐标系下。
PCL 是跨平台的开源点云库。PCL 最开始主要应用于机器人研究应用领域,目前在CAD、逆向工程、激光遥感测量、虚拟现实等领域的应用也逐渐展开。为了便于开发,该库被划分为模块化的代码库,每个代码库都可以进行单独的编译。根据不同基类对应的不同算法,PCL 将点云数据处理的流程进行整合,可使代码更加简洁,算法结构清晰。PCL 点云库的模块化使得算法实现过程更加紧凑和清晰,有助于解决三维激光点云的数据处理问题。
点云数据粗配准的基本思路是在缺少初始位姿信息的情况下,将两片点云大致粗略的配准到一个坐标系。在此基础上,ICP 及其改进算法配准的精度才能得到保证。近年来,国内外学者对粗配准算法进行了比较深入的研究。提出的配准算法是以扩展高斯球为基础的。左超等提出的方法以点云的空间分布稀疏状态来控制某一片点云的旋转角度,在熵函数的基础上分析点云空间分布状态,提出了一种ILSDE 粗配准方法。该算法在误差允许范围内能有效实现粗配准。顾旭波等提出在点云数据中利用SIFT 算法对关键点进行检测和筛选,随后运用曲面二次拟合计算其中点的主曲率,最后在设置阈值的基础上将主曲率与极值相对比,从而完成初始配准。本文采用基于PFPH (快速点特征直方图)与采样一致性相结合的粗配准方法,可以有效提高点云配准的精度和收敛速度。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




