
资料下载


×
如何使用视觉抓取进行并联桁架机器人最优路径控制的说明
消耗积分:0 |
格式:rar |
大小:0.85 MB |
2019-04-12
分享资料个
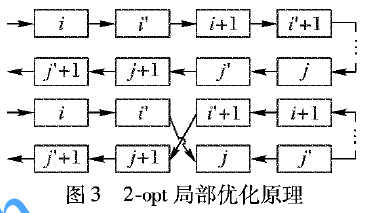
针对元件的抓取路径规划问题,提出一种以最小化时间为目的,结合蚁群算法和禁忌搜索算法的混合优化算法。首先,将基于机器视觉抓取元件的问题确定为有约束的旅行商问题(TSP);然后,分析了元件大小和抓取放置过程对于路径规划的综合影响,对路径选择概率和禁忌域进行了适应性改进;其次,一方面引入了2-opt局部优化以及信息素惩罚、奖励机制以改善蚂蚁的搜索能力,另一方面对信息挥发因子作适应性改进以提高蚂蚁的自适应能力;最后,针对基本算法和改进的混合优化算法,仿真实验和平台实验分别进行了性能指标和抓取时间的对比分析。实验结果表明,仿真环境下,与蚁群优化( ACO)算法和禁忌搜索(TS)算法相比,混合优化算法的平均迭代次数降低了约50%,且其他性能较为优越,平台测试的抓取用时测试结果也说明了混合优化算法较随机结果和基本算法的优越性,可以快速完成元件抓取任务。
工业摄像机作为工业机器人的视觉传感器,是工业生产需要的柔性制造系统( Flexible Manufacture System, FMS)、自动化工厂( Factory Automation, FA)的重要环节,是实现“中国制造2025”的自动化工具。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




