
资料下载


使用半导体激光器的激光雷达进行云和气溶胶定量剖面的演示
deeeeer
分享资料个
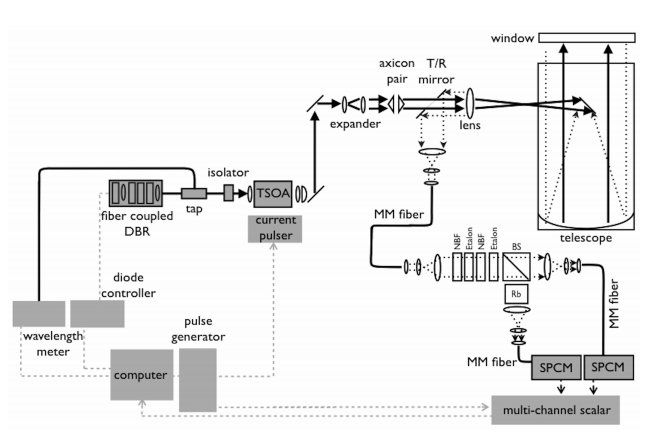
介绍了一种基于半导体激光器的高光谱分辨率激光雷达。它能够以150米的距离分辨率进行气溶胶和云光学特性的校准反演,白天和晚上在大约12公里的范围内积分时间小于1分钟。该仪器的工作波长为780nm,为可靠的半导体激光器和探测器奠定了良好的基础,之所以选择该波长是因为它对应于d2铷吸收线。该仪器采用同位素铷87的热蒸气参考池作为有效可靠的气溶胶信号屏蔽滤波器。从原理上讲,基于半导体激光器的高光谱分辨率激光雷达可以与弹性后向散射激光雷达系统相媲美,但通过直接检索云和气溶胶的定量光学特性,可以显著提高数据质量。
激光雷达由于对小颗粒物散射体的高灵敏度和对目标距离的直接飞行时间测量,在气溶胶和云的监测中具有明显的优势。它可以提供从被动传感器精确反演气溶胶光学厚度所需的气溶胶垂直分布。它还用于监测气溶胶传输和验证传输模型。这种激光雷达观测最好用定量激光雷达系统。传统的直接探测大气弹性后向散射激光雷达(简称“弹性后向散射激光雷达”)不能捕获足够的信息量,无法定量、独立地确定云和气溶胶的光学性质。大气层。这是因为有两个未知的大气光学项(传输和后向散射系数),但只有一个线性独立的检测通道。另外,弹性后向散射激光雷达没有直接的校准仪器重叠函数的机制,依赖于仪器功率稳定性的知识。klett和fernald的算法已经开发出来,试图用这些系统来恢复大气的定量光学特性。然而,它们需要假设大气粒子的消光与后向散射比(或激光雷达比)会有很大的变化,在低海拔地区容易出现明显的误差,在低海拔地区,几何重叠函数会增加不确定度,取决于对激光雷达发射功率的精确监测,在不同高度层大气之间的耦合和复合反演误差,如地球照护和CALIOP之间的误差比较[7]所示。值得注意的是,Klett和fernald算法在其lidar方程定义中包含一个几何重叠项。如果不加说明,几何重叠的影响会在倒排数据中产生很大的偏差。同时,利用弹性后向散射系统进行几何重叠的精确标定是相当困难的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





