
资料下载


×
自动驾驶插秧机的结构设计研究论文详细说明
消耗积分:0 |
格式:rar |
大小:5.03 MB |
2020-08-05
分享资料个
本文设计自动导航插秧机的电控转向机构、油门控制机构与刹车控制机构。电控转向机构由直流减速电机驱动,带动齿轮使方向盘自动转动,转动角度由编码器测出。油门控制机构与刹车控制机构均采用油缸驱动方式。本文对轴、齿轮离合器和轴承进行了设计与校核,这种装置可以大大提高农业生产率,减少人力资源的消耗,推动了农业高精机械化的发展。
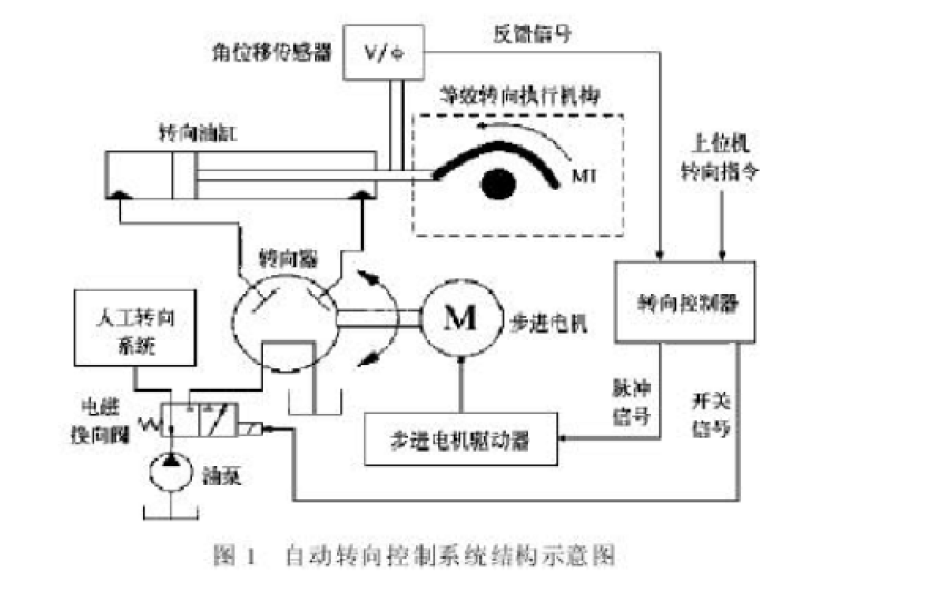
自动转向是智能车辆的一项关键技术,它可以自动地调整智能车辆的横向位置,实现对自动驾驶车辆的横向控制,是实现自动导航控制的基础。智能车辆使用最多的自动转向方式有两种,一种是电液控制转向系统如美国伊利诺斯州立大学通过对拖拉机转向系统进行改造,设计了一种电液操控系统以实现转向控制,系统主要由液压泵、三位四通电液比例方向控制阀、PWM电液阀驱动器和转向油缸等组成。另一种是控制电动机带动方向盘转动实现转向操作,如日本岩手大学研制的自动驾驶拖拉机,采用步进电机通过链条传动带动方向盘转动实现转向操作,中国农业大学魏延富博士研制了一套转向控制系统,由步进电机通过齿轮驱动方向盘实现转向。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






