
资料下载


PID自动控制算法的基本原理和使用说明
在等待中失去
分享资料个
在自动控制中,PID及其衍生出来的算法是应用最广的算法之一。各个做自动控制的厂家基本都有会实现这一经典算法。我们在做项目的过程中,也时常会遇到类似的需求,所以就想实现这一算法以适用于更多的应用场景。
一.
1、PID算法基本原理
PID算法是控制行业最经典、最简单、而又最能体现反馈控制思想的算法。对于一般的研发人员来说,设计和实现PID算法是完成自动控制系统的基本要求。这一算法虽然简单,但真正要实现好,却也需要下一定功夫。首先我们从PID算法最基本的原理开始分析和设计这一经典命题。
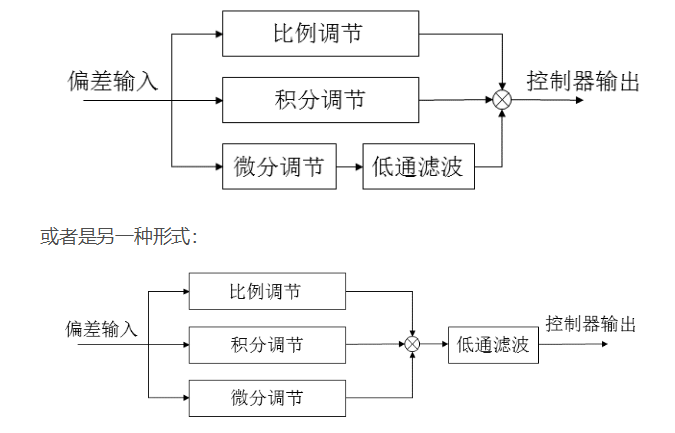
PID算法的执行流程是非常简单的,即利用反馈来检测偏差信号,并通过偏差信号来控制被控量。而控制器本身就是比例、积分、微分三个环节的加和。其功能框图如下:
根据上图我们考虑在某个特定的时刻t,此时输入量为rin(t),输出量为rout(t),于是偏差就可计算为err(t)=rin(t)-rout(t)。于是PID的基本控制规律就可以表示为如下公式:
其中Kp为比例带,TI为积分时间,TD为微分时间。PID控制的基本原理就是如此。
2、PID算法的离散化
上一节简单介绍了PID算法的基本原理,但要在计算机上实现就必须将其离散化,接下来我们就说一说PID算法的离散化问题。在实现离散化之前,我们需要对比例、积分、微分的特性做一个简单的说明。
比例就是用来对系统的偏差进行反应,所以只要存在偏差,比例就会起作用。积分主要是用来消除静差,所谓静差就是指系统稳定后输入输出之间依然存在的差值,而积分就是通过偏差的累计来抵消系统的静差。而微分则是对偏差的变化趋势做出反应,根据偏差的变化趋势实现超前调节,提高反应速度。
在实现离散前,我们假设系统采样周期为T。假设我们检查第K个采样周期,很显然系统进行第K次采样。此时的偏差可以表示为err(K)=rin(K)-rout(K),那么积分就可以表示为:err(K)+ err(K+1)+┈┈,而微分就可以表示为:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






