
资料下载


×
工件装配自动化生产线控制系统设计的详细资料说明
消耗积分:1 |
格式:pdf |
大小:3.84 MB |
2021-01-23
初光勇
分享资料个
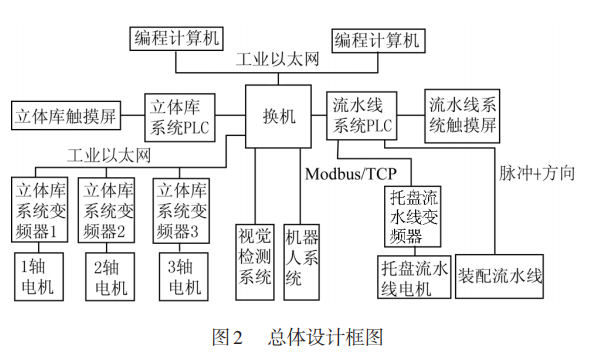
根据自动化生产线对机器人关节工件装配的要求,采用西门子PLC1200作为控制核心,实现码垛机从立体仓库进行工件自动出入库,通过 AGV小车实现立体仓库和托盘流水线间的托盘输送,采用智能相机的视觉系统实现工件识别,工业机器人完成工件在装配流水线上的自动装配,最终实现整个自动化生产线对工件的自动出库、装配、入库的过程。
自动化生产线在无人干预的情况下按规定的程序或指令自动进行操作或控制,本文依据自动化生产线对机器人关节工件装配流程及要求,进行码垛机控制系统、AGV小车控制系统、视觉控制系统、工业机器人自动装配控制系统进行研究和设计。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章







