
资料下载


如何使用脑电波驾驶遥控卡车
韩刚龙
分享资料个
描述
你想用你的思想来控制事物吗?这个教程描述了如何使用脑电波驾驶遥控卡车。耳机感应到我的脑电波并将它们传输到一台小型计算机。当我提高注意力或眨眼时,计算机会转换信号并将它们传递给卡车的遥控器,我已将其连接到计算机。当我集中注意力时,车轮会旋转。0ne 强烈的眨眼左转。强烈的双眨眼会右转。
耳机是NeuroSky MindWave Mobile 2,电脑是Arduino Uno微控制器,蓝牙模块是HC-05。
实际应用
一些开发人员已经应用这些想法来帮助瘫痪的人;例如,驾驶轮椅、家庭自动化或在屏幕上选择字母和单词以便在屏幕上或通过语音进行交流。他们的项目可以在 YouTube 上找到。
项目的主要步骤
这个项目有5个主要步骤:
- 将 HC-05 连接到 Arduino,对其进行配置,并将其与 MindWave 配对。
- 将舵机连接到遥控器。
- 给 Arduino 接线。
- Arduino 草图(代码)。
- 上传 Arduino 草图并使用它。
控制机器人车辆的方法
在开始我的项目之前,我在 Internet 上搜索了 NeuroSky 项目,以了解开发人员选择使用哪些脑电波信号。许多项目只使用了注意力和冥想级别,还有一些项目还使用了眨眼。在我的项目中,我决定使用注意力级别来控制向前和停止行驶,单闪左转或双闪右转。
有一个项目采用了非常不同的方法:当用户眨眼时,软件开始循环向前、向后、向左、向右,每个循环 2 秒。如果用户眨了两下眼,那么车辆就会在那个瞬间朝自行车所在的任何方向行驶。这种方法提供了很大的灵活性,但可能会很慢。例如,如果用户右转,他们将无法左转大约 6 秒,
将 NeuroSky MindWave Mobile 2 连接到 Arduino 的方法
一些开发人员通过蓝牙将他们的 NeuroSky MindWave Mobile 直接连接到 Arduino 板,这是我决定做的。这种方法比下一种方法更容易(如下所述),但检测到眨眼需要更长的时间(略超过 1 秒)。这对我的项目来说没问题。
其他开发人员通过计算机或智能手机对信号进行实时预处理,然后将数据发送到 Arduino。这允许进行更复杂的分析或处理,并且可以更快地检测到眨眼(大约半秒)。NeuroSky 在这个网站上有关于这种方法的教程,适用于 PC Windows、Apple Mac OSX、Android 和 IOS:我决定不使用这种方法,因为它需要学习如何在计算机或智能手机上对软件进行编程。
最大化注意力水平
最大化注意力水平的方法因人而异。以下是一些建议:
- 专注于一个对象。
- 仔细阅读食品容器上的成分清单。
- 记住食品容器上的一些营养成分。
- 从 100 倒数到 6 或 7。
- 在头脑中进行算术运算。
- 听一首说唱歌曲并尝试理解歌词。
- 用你不流利的语言阅读一些东西。
眨眼
眨眼需要很强才能被检测到。正常的眨眼被忽略。
头部应保持静止,以避免错误的眨眼检测。在这个项目中检测眨眼的方法包括检查从耳机接收到的信号的质量。强烈的眨眼会使前额的皮肤移动,从而降低信号的质量,这被解释为眨眼。如果头部移动,耳机的传感器可能会轻微移动,从而降低信号质量,这将被识别为眨眼。
这种检测眨眼的方法不使用大脑的神经信号。我的理解是 NeuroSky 的计算机/智能手机方法可以。
电子零件
- NeuroSky MindWave Mobile 2 耳机和 1 节 AAA 电池
- 一台电脑(我用的是 Apple iMac)
- Arduino Uno 或其他型号及其 USB 数据线
- HC-05蓝牙模块
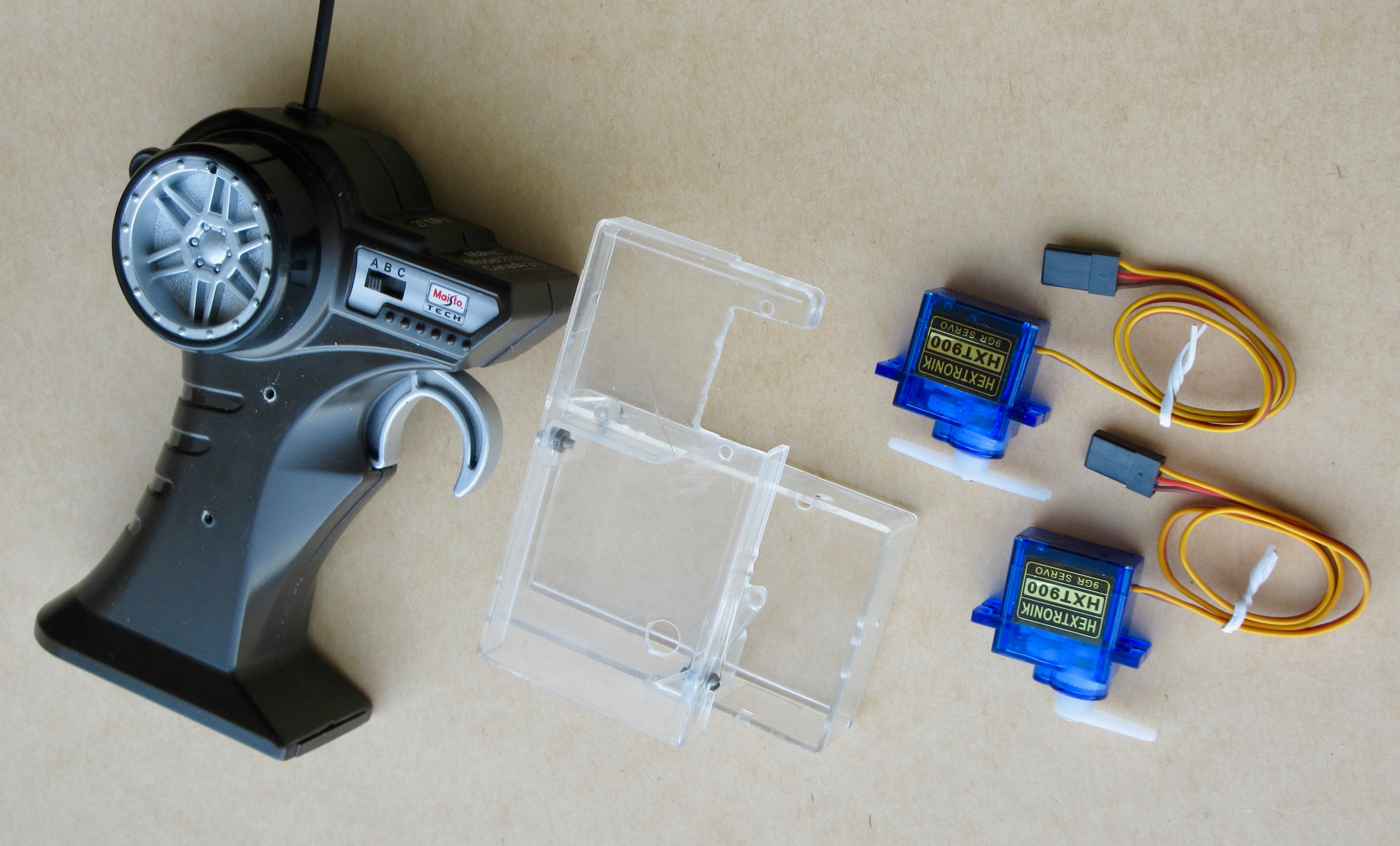
- 两个伺服电机(我使用 Solarbotics HXT900 Micro Servos)
- 面包板和面包板电线
- 绿色、黄色和红色 LED
- 3 x 330 欧姆电阻
- 2 x 1K 欧姆电阻
- 2 个 2K 欧姆电阻
- 电源,约 5 伏,如支架中的 3 节 AA 电池
伺服连接到遥控器的零件
- 小塑料或纸板箱,或其他方式将伺服系统固定到位
- 胶水或螺母和螺栓将盒子的各个部分连接在一起
- 将其连接到遥控器的某种方式。(我用了 2 个螺丝。)
- 用于连接伺服系统的小螺母和螺栓。(我使用了一些实心线和 2-56 号螺栓,并且不得不稍微扩大伺服中的螺栓孔。)
第 1 步:将 HC-05 连接到 Arduino,配置并配对
有关详细信息,请查看我之前的一个项目中的步骤 1 和 2:
第 2 步:将伺服器连接到遥控器
有两种方法可以将 Arduino 连接到卡车的遥控器:
遥控器可能被黑客攻击如下:移除或绕过由控件推动的开关,然后将 Arduino 连接到控制器的电路板并对 Arduino 进行编程以在适当的电线上施加电压。我的遥控器中的开关非常小,以至于我认为尝试将新电线焊接到电路板上的适当位置太棘手了。如果我犯了一个小错误,董事会可能会被毁掉。
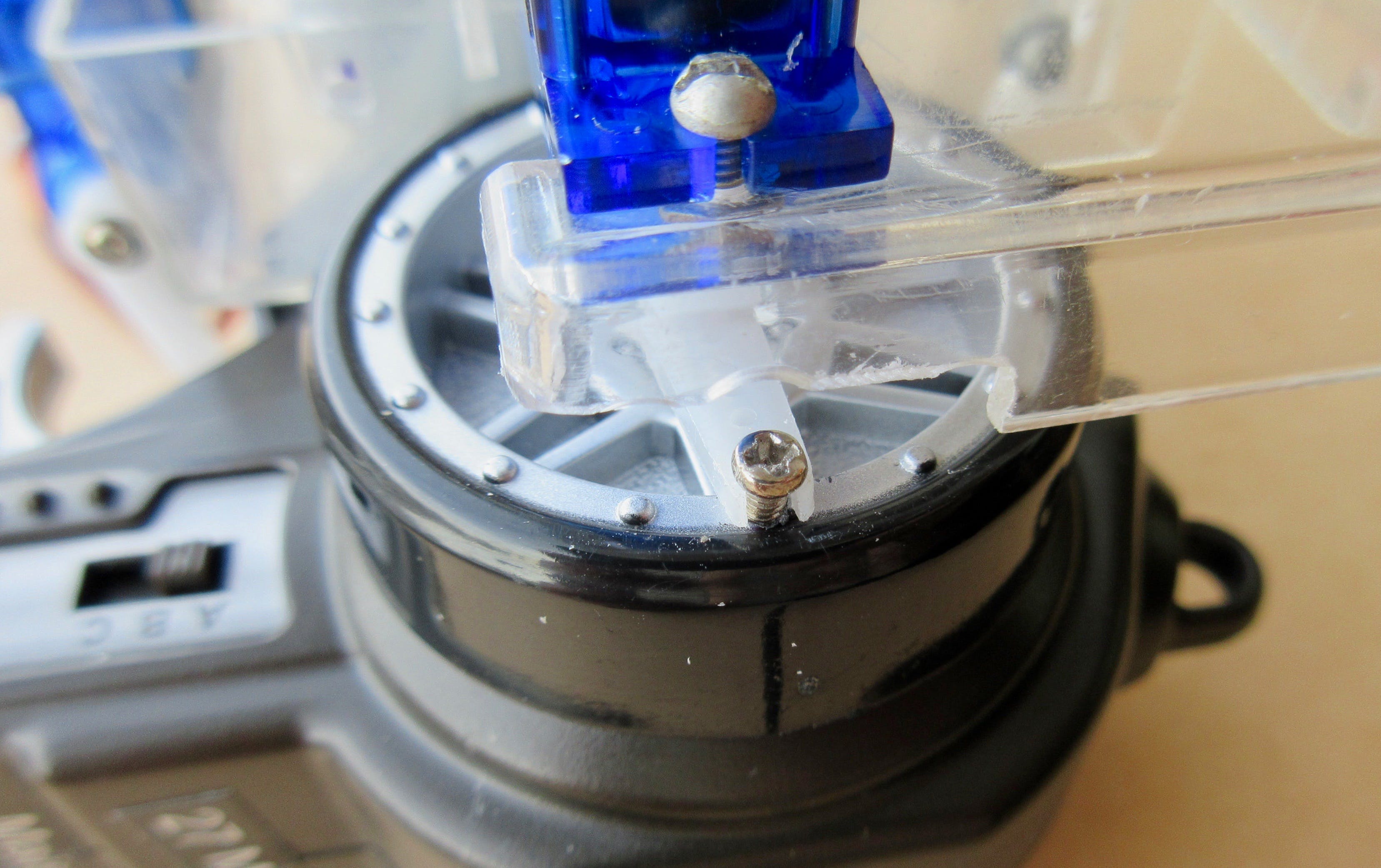
我使用伺服系统来移动控件。将伺服系统连接到遥控器上被证明是一个“有趣”的挑战,但现在一切正常。
幸运的是,经过一些切割和装配后,有一个大小合适的小塑料盒可以将伺服系统连接到卡车的遥控器上。尺寸为 2-56 的螺母和螺栓将盒子的各个部分固定在一起。两个螺丝将盒子固定在遥控器上。
左/右控制的伺服臂末端有一个小凹口,给它一些摆动空间。伺服臂的中心不太可能与控制中心完全对齐。固定该臂末端的螺钉需要稍微松动。
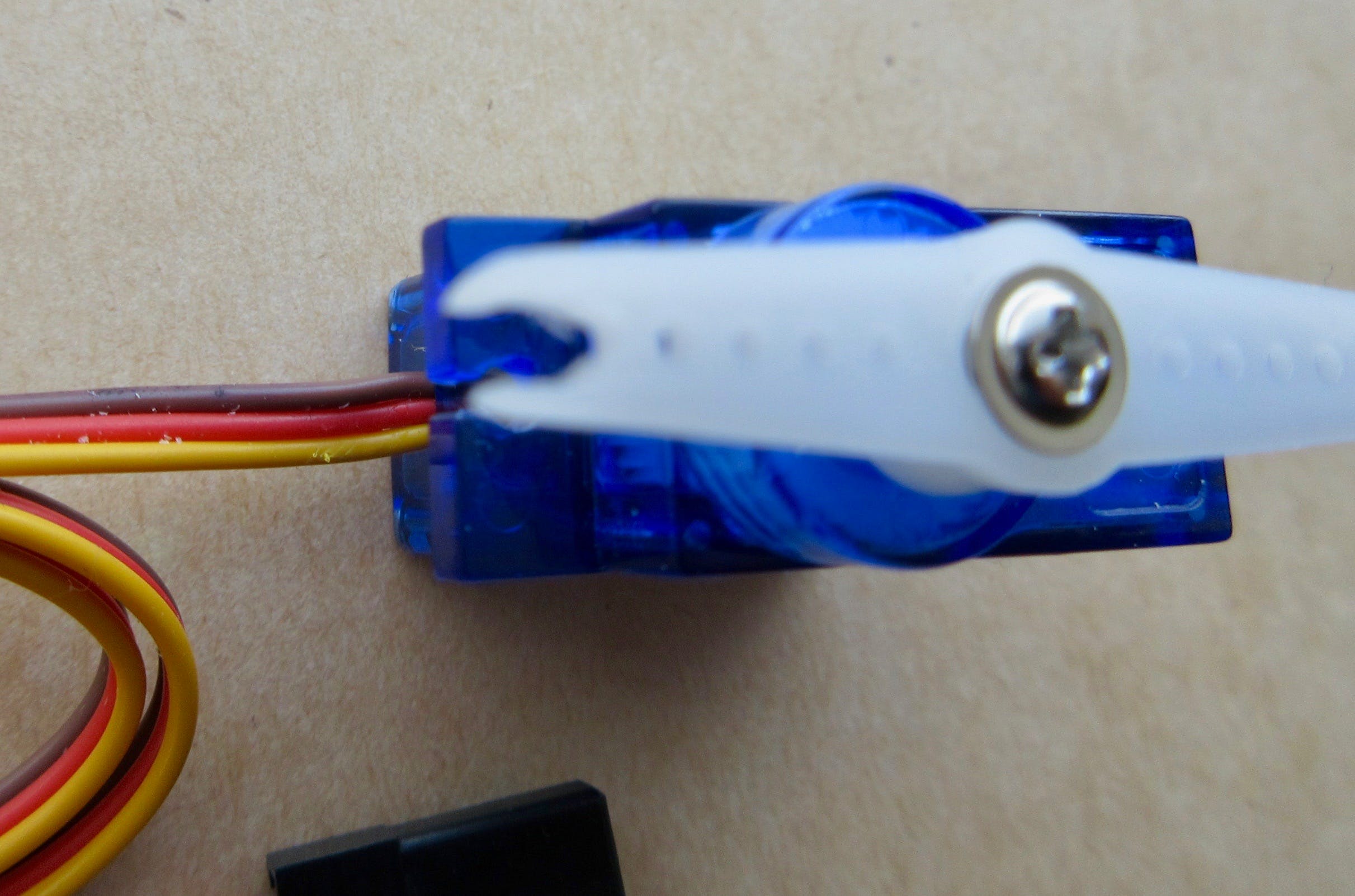
为了连接左/右舵机,我使用了 2-56 尺寸的螺母和螺栓,并且不得不稍微扩大舵机上的螺栓孔。实心线将 Go/Stop 伺服固定到位。
第 3 步:连接 Arduino
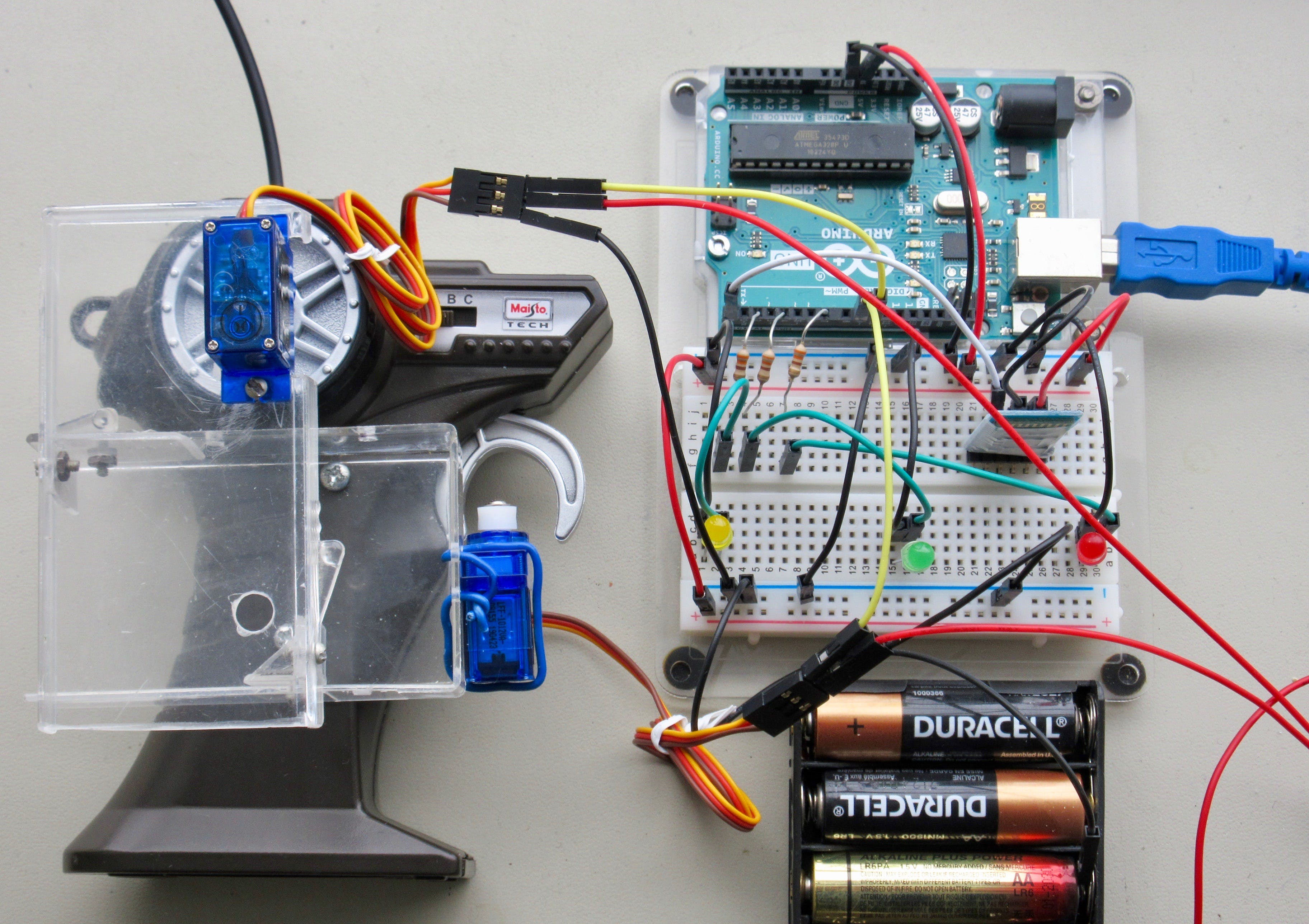
电路如图所示,描述如下:
- Arduino 的 +5V 连接到面包板上的 +
- Arduino 的 GND 连接到 - 在面包板上
- 330 欧姆电阻从引脚 2 到黄色 LED 的长线和另一根 LED 线到 - 在面包板上
- 330 欧姆电阻从引脚 4 到绿色 LED 的长线和另一根 LED 线到 - 面包板上
- 330 欧姆电阻从引脚 7 到红色 LED 的长线和另一根 LED 线到 - 在面包板上
- 引脚 9 连接到 Go/Stop 伺服的信号线。是那个黄色的。
- 引脚 10 连接到左/右舵机的信号线。
- - 伺服系统的橙色线连接到单独的 4.5 伏电源的正极。
- - 伺服系统的棕色电线连接到 - 面包板上。
- - 单独电源的负号转到 - 在面包板上。
- HC-05 TXD 连接到 Arduino 的 RX(引脚 0)
- HC-05 + 转到面包板上的 +
- HC-05 GND 连接到 - 在面包板上
第 4 步:Arduino 草图(代码)
该代码具有以下主要功能:
- 从 MindWave 耳机读取数据。
- 当注意力超过 70 时打开绿色 LED 并移动 Go/Stop 伺服臂以推动 Go/Stop 触发器。
- 当注意力小于 70 时关闭绿色 LED 并将 Go/Stop 伺服臂移回其中点。
- 检测到闪烁时打开黄色 LED,并将闪烁信号设置为 1。
- 1.2 秒后检查第二次闪烁。
- 如果是单次闪烁,将左/右伺服臂向“左”移动 2 秒钟,然后将其转回,并关闭黄色 LED。
- 如果是双闪,打开红色 LED,关闭黄色 LED,将左/右伺服臂“向右”移动 2 秒钟,然后将其转回,然后关闭红色 LED。
- 在每个主要步骤中,在计算机上的串行监视器中显示数据。
Arduino 草图(代码)可以从该项目中包含的.ino 文件中下载,或者可以将以下代码复制并粘贴到新的 Arduino 草图中。(在编写这些指令时,instructables 系统有时会删除位于代码开头的部分#include 语句。第一个应该是#include 后跟左箭头 < 后跟 Servo.h 后跟右箭头 > 和第二个应该是#include,后跟左箭头<,然后是Mindwave.h,然后是右箭头>)。
草图使用一个特殊的库,必须在运行草图之前安装。
这个项目可以不使用库来完成,但是代码会更复杂。从耳机读取数据、提取注意力级别和检查信号质量的代码在本网站包含的示例代码中:
草图应该可以成功编译,但可能会显示 MindWave.cpp 库的警告消息。这可能会被忽略。
//
// 草图使用大脑的注意力水平进行 Go/Stop 和
// 转弯时眨眼。
//
// 硬件:Arduino Uno、HC-05 蓝牙、NeuroSky MindWave Mobile 2。
// 高度关注 = 绿色 LED 亮(开始);低 Att = 绿色 LED 熄灭(停止)。
//第一次闪烁&左转=黄色LED;双闪 = 红色 LED(右)。
// 左右转为 2 秒。
// 信息显示在串行监视器上。
//
#include
#include
思维波思维波;
#define YLED 2 // 定义 LED 引脚
#define GLED 4
#定义 RLED 7
伺服myservoG;// 开始/停止伺服
伺服myservoLR;//左/右舵机
int gosignal = 0; // 走或停指标
int 闪烁信号 = 0; // 第一次闪烁后的信号计数器
int 闪烁 = 0; // 一组闪烁次数
长时间未签名;// 经过时间的变量
无符号长时间0;// 第一次闪烁时间的变量
无符号长时间1;// 从第一次闪烁到第二次闪烁的时间变量
无效设置(){
Serial.begin(MINDWAVE_BAUDRATE);
pinMode(13,输出);// 将 LED 引脚初始化为输出
pinMode(GLED,输出);
pinMode(YLED,输出);
pinMode(RLED,输出);
myservoG.attach(9); // 将 Go/Stop 伺服连接到引脚 9
myservoG.write(90); // 将舵机移动到中点
myservoLR.attach(10); // 将左/右伺服器连接到引脚 10
myservoLR.write(90); // 将舵机移动到中点
延迟(15);// 给伺服时间移动到那里
}
无效 onMindwaveData() {
if (mindwave.quality() < 90) { // 如果质量差,板载 LED 亮起
数字写入(13,高);
} 别的 {
数字写入(13,低);
}
// 检查注意力等级
if ((mindwave.attention() > 70) && (gosignal == 0)) {
Serial.print("Go, ");
Serial.print("\注意:");
Serial.print(mindwave.attention());
时间=毫秒();
Serial.print("\ttime:");
序列号。打印(时间);
序列号.println();
数字写入(GLED,高);// 绿色 LED 亮
信号 = 1; // 表示去
myservoG.write(130); // 机器人前进的伺服
延迟(4000);// 在检查前等待 4 秒
// 如果注意力下降
}
if ((mindwave.attention() < 70) && (gosignal == 1)) {
Serial.print("停止, ");
Serial.print("\注意:");
Serial.print(mindwave.attention());
时间=毫秒();
Serial.print("\ttime:");
序列号。打印(时间);
序列号.println();
数字写入(GLED,低);// 绿色 LED 熄灭
信号 = 0; // 表示停止前进
myservoG.write(90); // 机器人停止伺服
延迟(15);
}
// 第一次闪烁
if ((mindwave.quality() < 95) && (blinksignal == 0)) {
Serial.print("第一次闪烁");
Serial.print("\tquality:");
Serial.print(mindwave.quality());
时间=毫秒();
Serial.print("\ttime:");
序列号。打印(时间);
Serial.print("\tgosignal:");
Serial.print(gosignal);
Serial.print("\tblinksignal:");
串行打印(闪烁信号);
序列号.println();
time0 = 毫秒();
眨眼 = 1;
闪烁信号 = 1;// 第一次闪烁
数字写入(YLED,高);// 黄色 LED 亮
}
// 闪烁后立即显示质量,并增加计数器
// 来自耳机的信号
if ((blinksignal > 0) && (blinksignal < 4)) {
Serial.print("\tquality:");
Serial.print(mindwave.quality());
时间=毫秒();
Serial.print("\ttime:");
序列号。打印(时间);
Serial.print("\tgosignal:");
Serial.print(gosignal);
Serial.print("\tblinksignal:");
串行打印(闪烁信号);
序列号.println();
如果(闪烁信号> 0){
闪烁信号 = 1 + 闪烁信号;// 增加信号计数器
}
time1 = millis() - time0;
}
// 双闪?
if ((mindwave.quality()<95) && (time1 > 1200)){
Serial.print("\tquality:");
Serial.print(mindwave.quality());
时间=毫秒();
Serial.print("\ttime:");
序列号。打印(时间);
Serial.print("\tgosignal:");
Serial.print(gosignal);
Serial.print("\tblinksignal:");
串行打印(闪烁信号);
Serial.print("\ttime1:");
序列号.print(time1);
Serial.print("\tblinks now = 2");
序列号.println();
眨眼 = 2;
}
// 单闪左转
if ((blinks == 1) && (blinksignal > 3)) {
Serial.print("左, ");
Serial.print("\t单闪");
时间=毫秒();
Serial.print("\ttime:");
序列号。打印(时间);
Serial.print("\tgosignal:");
Serial.print(gosignal);
Serial.print("\tblinksignal:");
串行打印(闪烁信号);
序列号.println();
闪烁信号 = 0; // 为下一次闪烁重置
// 机器人左转轮子 2 秒的代码
myservoLR.write(55);
延迟(2000);
数字写入(YLED,低);// 黄色 LED 熄灭
// 机器人将车轮从左转直的代码
myservoLR.write(90);
延迟(15);
}
// 双闪右转
if ((blinks == 2) && (blinksignal > 3)) {
Serial.print("对,");
Serial.print("\t双闪");
时间=毫秒();
Serial.print("\ttime:");
序列号。打印(时间);
Serial.print("\tgosignal:");
Serial.print(gosignal);
Serial.print("\tblinksignal:");
串行打印(闪烁信号);
序列号.println();
数字写入(RLED,高);// 如果右转,红色 LED 亮
数字写入(YLED,低);// 黄色 LED 熄灭
闪烁信号 = 0; // 为下一次闪烁重置
// 机器人右转轮子 2 秒的代码
myservoLR.write(120);
延迟(2000);
数字写入(RLED,低);// 红色 LED 熄灭
// 机器人从右转直的代码
myservoLR.write(90);
延迟(15);
}
}
无效循环(){
mindwave.update(串行,onMindwaveData);
}
第 5 步:上传 Arduino 草图并使用它
- 在计算机上启动 Arduino 应用程序。
- 将伺服系统连接到单独的电源。伺服臂移动了几度,但当草图运行时它们会移回中点。
- 将 Arduino 的 USB 电缆连接到计算机。HC-05 应该快速闪烁。
- 断开 HC-05 的 TXD 线与 Arduino 的 RX(引脚 0)的连接,上传草图,然后重新连接此 RX 线。
- 打开串行监视器。检查波特率是否为 57600。
- 打开遥控卡车的电源。
- 开启 MindWave。几秒钟后,HC-05 应每 3-4 秒快速闪烁 2 次,表示设备已配对。
- 将 MindWave 戴在头上并连接耳夹。它现在应该将数据发送到 Arduino。
- 完成后,关闭串行监视器。
- 关闭 MindWave。
- 断开 USB 电缆与 Arduino 或计算机的连接。
- 退出 Arduino 应用程序。
- 从单独的电源上断开伺服的电源线。
- 关闭卡车电源。
将草图上传到 Arduino 后,它可以使用单独的电源,而不是通过 USB 连接到计算机。唯一的区别是没有串行监视器来显示数据。步骤如下:
- 将伺服系统连接到单独的电源。伺服臂移动了几度,但当草图运行时它们会移回中点。
- 将 Arduino 连接到电源。
- 打开遥控卡车的电源。
- 开启 MindWave。几秒钟后,HC-05 应每 3-4 秒快速闪烁 2 次,表示设备已配对。
- 将 MindWave 戴在头上并连接耳夹。它现在应该将数据发送到 Arduino。
- 完成后,关闭 MindWave。
- 断开 Arduino 与电源的连接。
- 从单独的电源上断开伺服的电源线。
- 关闭卡车电源。
重要笔记
如果你的 HC-05 的固件是 2 或 3 版本,我的理解是在 AT+INQ 命令之前需要 AT+INIT 命令。我的HC-05的固件是4.0-20190815版本,AT+INIT命令不识别。要检查 HC-05 的版本,请输入以下命令:AT+VERSION
如果您按下 Arduino 的重置按钮,这会将 HC-05 的设置恢复为出厂默认设置。必须重复所有配对步骤。
如果在上传草图之前 HC-05 的 TXD 未与 Arduino 的 RX 断开连接,则会在计算机屏幕上 Arduino 应用程序窗口的底部出现错误消息。以下错误消息重复 10 次:avrdude: stk500_recv(): 程序员没有响应avrdude: stk500_getsync() 尝试 1 of 10: not in sync: resp=0x00
使用舵机时,需要单独的电源,例如 3 节 1.5 伏电池。Arduino 的 GND 必须连接到外部电源的负极。如果没有外部电源,USB 源的电源似乎不足,并且 HC-05 会在伺服激活时失去配对。它在几秒钟后配对,然后在下次伺服激活时取消配对。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






