
资料下载


×
使用Micro Step Motor Controller和PHPoC通过Web绘图
消耗积分:0 |
格式:zip |
大小:0.32 MB |
2023-01-31
张鑫
分享资料个
描述
关于该项目
这个项目类似于我的另一个项目。本项目没有使用步进电机控制器(使用全步或半步法控制步进电机),而是使用步进电机控制器Ⅱ(使用微步法控制步进电机)。微步进方式使步进电机运动更平稳,与整步和半步进方式相比振动显着降低(振动是步进电机的弱点之一)。
怎么运行的
当手指触摸到网页中的绘图区域时,触摸点的XY坐标被发送到PHPoC。缩放坐标后,PHPoC 将移动两个步进电机将笔定位到该坐标。在移动期间,PHPoC 不断将笔的轨迹发送给 web 应用程序,网络应用程序在画布上绘制轨迹。
接线
- 在 PHPoC 上堆叠两个步进电机控制器
- 连接伺服电机
- 连接到限位开关。
该项目使用两个电机和两个步进电机控制器:
- 一台步进电机和一台步进电机控制器控制左右方向(X轴)。此步进电机控制器需要连接到 XY-Plotter 左右两侧的两个限位开关。向左切换到 SW#1,向右切换到 SW#0。
- 一台步进电机和一台步进电机控制器控制上下方向(Y轴)。此步进电机控制器需要连接到 XY-Plotter 顶部和底部的两个限位开关。底部开关到 SW#1,顶部开关到 SW#0。
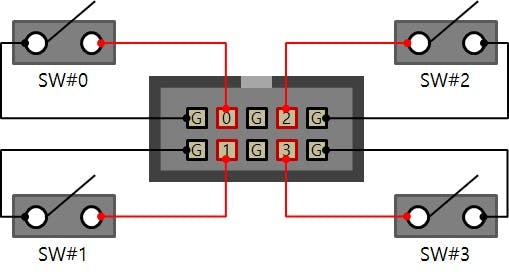
注意:我们只使用 SW#0 和 SW#1。我们不使用图像中的 SW#2 和 SW#3
源代码
主要任务(task0.php):
- 从网页接收命令并根据命令执行任务
- CMD_MOVE:通过控制两步进电机将笔移动到一个位置
- CMD_PEN_UP:通过改变伺服电机的角度来抬起笔
- CMD_PEN_DOWN:通过改变伺服电机的角度来降低笔
- 连续读取笔的当前位置并发送到网页
网页界面 (index.php)
- 提供用户界面
- 处理用户事件并将带有坐标的命令发送到 PHPoC
- 从PHPoC接收轨迹并在网页上绘制
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章







