

SystemVerilog中线程常用的精细化控制方法
电子说
描述
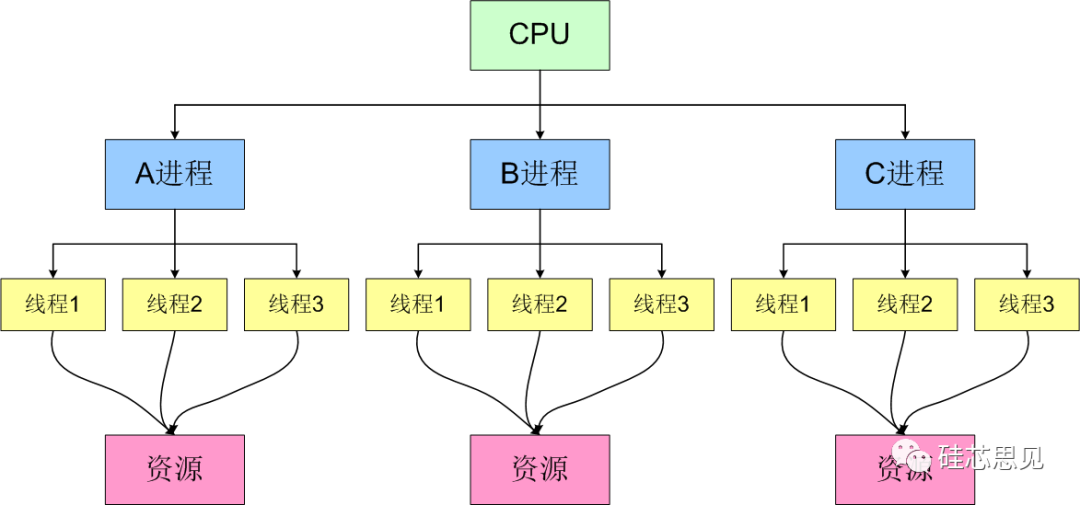
在计算机中存在进程和线程的概念,其中进程是并发执行的程序在执行过程中分配和管理资源的基本单位,线程是进程的一个执行单元,是比进程还要小的独立运行的基本单位。在一个程序中至少有一个进程,一个进程至少有一个线程。进程是资源分配最小单位,线程是程序执行的最小单位。
计算机在执行程序时,会为程序创建相应的进程,进行资源分配时,是以进程为单位进行相应的分配。每个进程都有相应的线程,在执行程序时,实际上是执行相应的一系列线程,过程如下图所示。
在SystemVerilog中,虽然IEEE中也使用了process和thread,但是在实际手册解释的过程中,两个概念基本上处于互用的状态,所以本文统一使用线程进行描述说明SystemVerilog中线程常用的精细化控制方法。
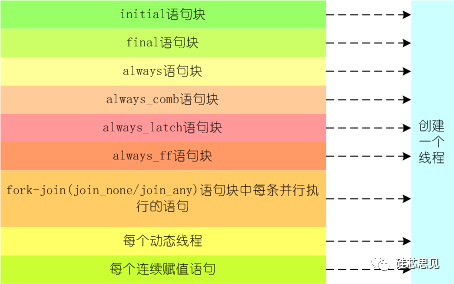
在SystemVerilog中,线程的创建主要有以下几种方式:
Ø每一个initial结构都会创建一个对应的线程;
Ø每一个final结构都会创建一个对应的线程(关于final用法参考《SystemVerilog中的final是怎么结束的》);
Ø每一个always、always_comb、always_latch和always_ff结构都会创建对应的线程;
Øfork-join(join_any/join_none)结构中每条并行执行的语句块;
Ø每一个动态线程,一般并行执行的线程并且不会阻塞其他线程或者task中其他语句执行的线程;
Ø每一个连续赋值语句;
在SystemVerilog中可以通过process来实现对于上述线程的控制,而这个process其实是SystemVerilog中的一个内建类,通过该类声明的句柄可以指向特定的线程,从而可以通过该句柄实现对于指向线程的访问控制。process类在SystemVerilog中的定义如下:
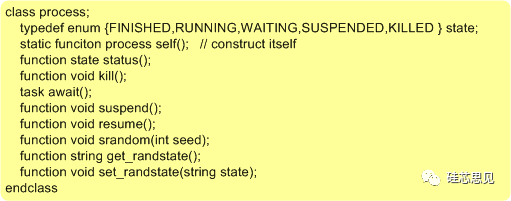
虽然process是一个类,但是这哥们比较特殊,不能被拓展派生,也就是说process不会有子类的,并且该类在创建对象时,是不能使用new函数的,process类型句柄指向对象是通过process::self()完成的,因此如果用户需要通过process句柄指向对应的线程时需要在对应的线程中调用process::self()实现。在process中经常用来实现对于线程控制的方法主要如下:
Øself()返回指向当前线程的句柄;
Østatus()返回当前句柄指向线程的状态(包含的状态有:FINISHED、RUNNING、WAITING、SUSPEND和KILLED等状态);
Økill()终止当前句柄指向的线程及其开启的所有子线程;
Øawait()等待调用其的句柄指向的线程执行完成,注意不能在调用其的句柄指向的线程中使用该方法,只能在别的线程中调用该方法用以阻塞调用该方法的句柄指向的线程;
Øsuspend()挂起当前句柄指向线程;
Øresume()恢复被挂起的线程;
Øsrandom()设置线程的随机种子;
上述方法中,kill()、await()、suspend()、resume()只能用于initial、always和fork结构启动的线程。下面将针对process中这些方法的使用进行示例说明。
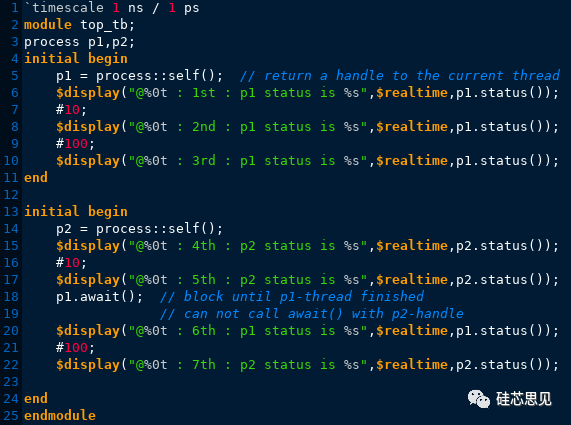
【示例】
【仿真结果】
示例中,首先声明了两个句柄p1和p2,在两个initial结构中,p1和p2通过调用“process::self()”实现p1和p2分别指向其所在的initial结构开启的线程。
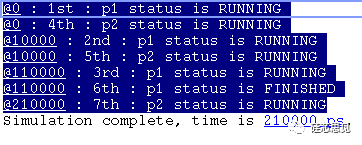
在第一个initial结构中“@0”时刻第一个$display中通过p1.status()方法获取了当前线程的状态(log中显示为RUNNING),然后等待10个时间单位后,再次调用$display(),在其中调用p1.status()方法获取了当前线程时刻“@10”的状态(log中显示为RUNNING),再经过100个时间单位,在时刻@110再次在$display()中调用p1.status()方法获取了当前线程的执行状态(log中显示为RUNNING),该语句执行完后第一个initial结构开启的线程执行完毕。
第二个initial结构中,“@0”时刻第一个$display中通过p2.status()方法获取了当前线程的状态(log中显示为RUNNING),然后等待10个时间单位后,再次调用$display(),在其中调用p2.status()方法获取了当前线程时刻“@10”的状态(log中显示为RUNNING),然后通过p1调用await()方法,p1.await()后的语句将处于等待p1指向线程执行完毕,其后的语句此时处于阻塞的状态,当p1指向的线程(也就是第一个initial结构)在时刻“@110”执行完毕,p1.await()不再阻塞其后语句的执行,其后的语句继续执行,此时调用p1.status()显示的值为p1当前的状态(log中显示此时p1状态位FINISHED)。在等待100个时间单位,在时刻“@210”调用p2.status()时,p2指向的线程还没有执行完毕,所以其显示的状态仍为RUNNING。上述两个线程执行的过程如下图所示。

【示例】
【仿真结果】
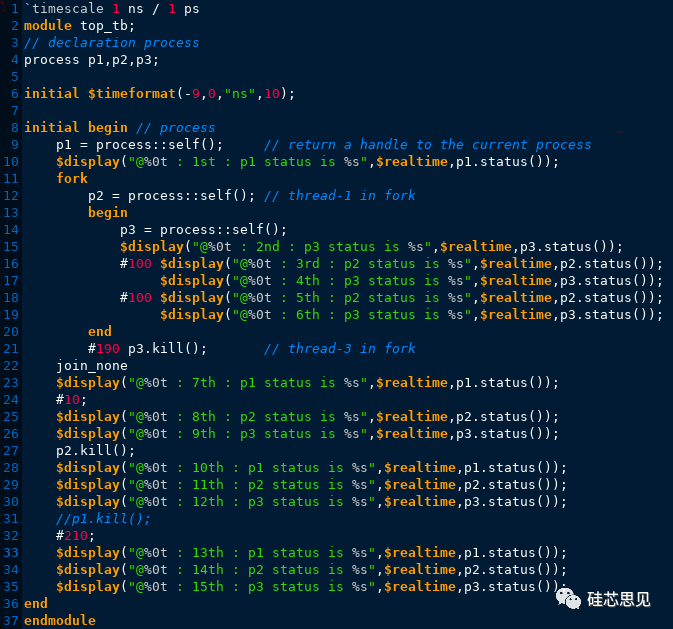
示例中,声明了三个process句柄p1、p2和p3.在initial结构中调用“process::self()”实现p1指向当前的initial结构开启的线程,然后调用$display语句通过p1.status()获取当前initial结构开启线程的执行状态为RUNNING(该initial结构正在执行中)。
fork-join_none结构中所有语句是并行执行的,示例中的fork结构中一共有三个线程,
第一个线程通过调用“process::self()”实现p2指向自己,当该方法结束后,该线程的历史使命也就结束了,这里需要注意p2并没有指向fork。
第二个线程为一个begin-end结构,在begin-end中首先通过调用“process::self()”实现了p3指向该线程,然后调用$display中通过p3.status()获取当前线程执行状态为RUNNING(该begin-end结构还在执行中),在等待100个时间单位,通过p2.status()和p3.status()获取当前时刻p2和p3指向线程的执行状态,因为p2指向的线程在调用“process::self()”完后就执行完了,所以p2.status()返回的状态位FINISHED,p3.status()获取的状态值仍为RUNNING(其所指向begin-end结构还在执行中),再等待100个时间单位,通过p2.status()和p3.status()获取当前时刻p2和p3指向线程的执行状态,因为此时fork-join_none中并行执行的第三个线程通过p3调用了kill()方法,所以begin-end结构对应的线程被kill掉,因此此时企图在等待100个时间单位再次获取p2和p3执行状态的语句不会执行。
第三个线程为等待190个时间单位后调用p3.kill(),实现了对于fork-join_none中第二个线程的kill操作。
fork-join_none结构后通过p1.status()获取p1指向线程的执行状态为RUNNING(因为p1指向的initial结构正在执行中);
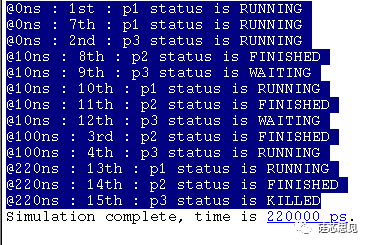
在经过10个时间单位,通过p2.status()和p3.status()获取当前时刻p2和p3指向线程的执行状态分别为FINISHED(p2指向线程已经执行完毕)和WAITING(p3指向线程正在执行其中#100,处于延迟阻塞等待状态);
通过p2.kill()企图kill掉p2指向的线程,实际上此时p2指向的线程已经执行完毕,所以并不会影响p2指向线程的状态,所以此时在p2.kill()后通过p2.status()和p3.status()获取当前时刻p2和p3指向线程的执行状态仍为FINISHED(p2指向线程已经执行完毕)和WAITING(p3指向线程还在执行其中#100,处于延迟阻塞等待状态);
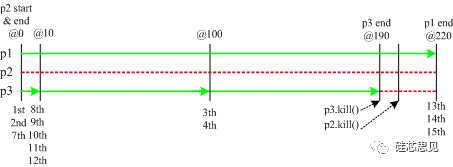
在经过210个时间单位,通过p1.status()、p2.status()和p3.status()获取当前时刻p1、p2和p3指向线程的执行状态为RUNNING(p1指向的initial结构正在执行中)、FINISHED(p2指向线程已经执行完毕)和KILLED(p3指向的线程执行完之前,在fork-join_none结构中等待190个时间单位时已经被kill掉了,所以此时状态位KILLED);上述线程执行过程如下图所示。
【示例】
【仿真结果】
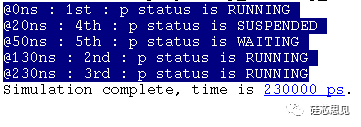
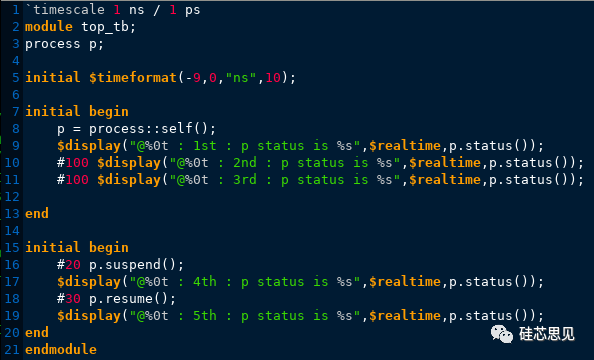
示例中,p通过“process::self()”指向了当前的线程,通过$display显示了p.status()为RUNNING,等待100个时间单位,企图通过p.status()显示p的状态,但是在这100个时间单位等待到其中的20个时间单位时,另外一个initial结构中仿真开始等待的20个时间单位后调用了p.suspend(),即此时将p指向的线程挂起,所以此时p指向的线程这时处于挂起等待状态,$display显示了p.status()为SUSPEND,在再等待30个时间单位,调用p.resume()将之前挂起的p指向的线程返回,因为当前线程并未阻塞,所以当前线程继续执行,$display显示了p.status()为WAITING,当前initial执行完后,p指向的线程再次开始继续之前暂停的执行。
再等待80个时间单位(之前100个时间单位计时20个时间单位后还剩下80个时间单位未计时)调用$display显示了p.status()为RUNNING,再等待100个时间单位后调用$display显示了p.status()仍为RUNNING。上述线程执行过程如下图所示。
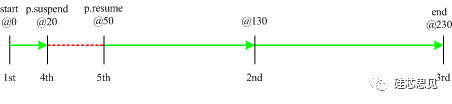
通过示例可以看到,await是用来等待一个线程执行完成后返回的,而suspend则用来将一个线程手动挂起,其解除必须通过resume()来完成,并不一定要等到线程执行完毕。
上述通过示例展示了process中常用方法的使用,其实在UVM中对于线程的控制大多都是通过process完成的,如下例中run_phase的执行。
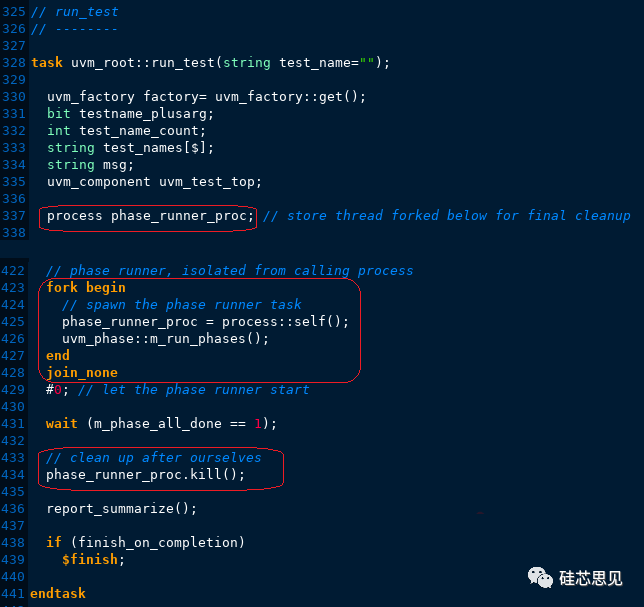
当我们执行run_test时,实际上在run_test这个task中声明了一个process句柄phase_runner_proc,这个句柄在425行通过“process::self()”指向了当前fork-join_none结构中的一个线程,这个线程就是fork-join_none中的begin-end。当后续的m_run_phases()执行完成后,wait等到了m_phase_all_done拉高,表明当前的run_phases执行完毕,然后通过phase_runner_proc.kill()将fork-join_none中开启的线程及其所有子线程都kill掉,相当于打扫战场,从而通过process实现了对于fork-join_none中线程及其所有子线程的控制操作。
审核编辑:刘清
-
[原创] 欧洲精细化工展览会(ChemSpec Europe 2010)2010-02-26 1656
-
2010年迪拜精细化工展2010-06-02 1910
-
2010迪拜精细化工展/中东化工技术机械展2010-06-29 2920
-
怎么才能让无线站点实现精细化覆盖?2019-08-14 2256
-
实用精细化工辞典2008-11-29 1664
-
精细化工常用原材料手册2008-11-30 1540
-
无线站点精细化覆盖2012-04-29 1279
-
基于UEMS的电力系统精细化稳定控制系统2017-01-04 950
-
MES系统实行精细化管理的六大步骤2018-06-04 4093
-
如何才能实现smt贴片车间的精细化管理2020-09-28 2219
-
基于TransModeler软件的精细化交通设计2022-08-20 3486
-
进程(线程)精细化控制中方法的使用2023-03-26 1337
-
综合管廊精细化节能系统设计与实施2024-06-19 1099
-
海康威视企业园区精细化管理研讨会成功举行2025-05-13 1223
-
施耐德电气驱动精细化工行业智能创新2025-09-01 835
全部0条评论

快来发表一下你的评论吧 !
