
资料下载


×
直流电机速度环之MATLAB仿真
消耗积分:0 |
格式:pdf |
大小:0.48 MB |
2023-03-30
贾飞世
分享资料个
增量式PI控制器的C语言描述:
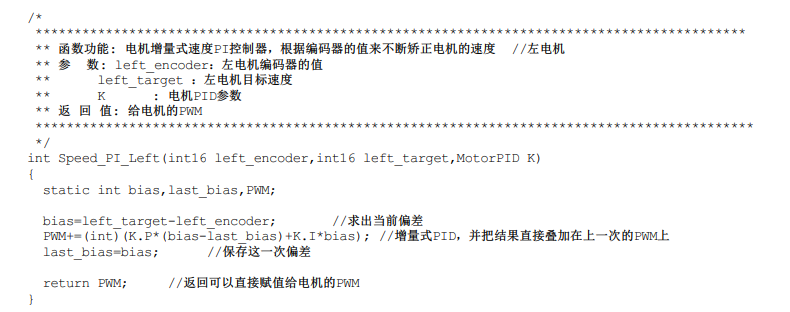
从上面的程序可以看出,增量式PI控制器有两个特点: 一是积分项没有积分累积,其优点是只需要当前时刻和上一时刻的偏差即可计算,不需要存储每一时刻的偏差,因此占用的内存空间小,计算更快,也不需要对积分项作出限幅。直流电机的速度环控制 需要频繁进行计算才能保证最大程度的匀速,且速度环目标速度一般不会有大幅度变化,和增量式PI控制器的优点完美契合; 二是保留了积分项但是抛弃了微分项,保留积分项的原因是电机是一个需要持续输出的系统(电机需要无时无刻地转动),如果没有积分项,当电机到达目标速度后,由于此时误差=0,控制器将不会再 有任何输出。而电机没有了输入其速度将开始下降,当电机速度开始下降时,控制器的误差又≠0,此时控制器又开始输出控制量。这样往复振荡最终停下的速度≠目标速度,也就是产生了静差。而消除 静差的方法就是加入积分项,积分项拥有“记忆”,主要用于持续跟踪过去,当稳态静差产生后,积分项将负责弥补这之间的误差。相比之下微分项的作用微乎其微,可以忽略。
从上面的程序可以看出,增量式PI控制器有两个特点: 一是积分项没有积分累积,其优点是只需要当前时刻和上一时刻的偏差即可计算,不需要存储每一时刻的偏差,因此占用的内存空间小,计算更快,也不需要对积分项作出限幅。直流电机的速度环控制 需要频繁进行计算才能保证最大程度的匀速,且速度环目标速度一般不会有大幅度变化,和增量式PI控制器的优点完美契合; 二是保留了积分项但是抛弃了微分项,保留积分项的原因是电机是一个需要持续输出的系统(电机需要无时无刻地转动),如果没有积分项,当电机到达目标速度后,由于此时误差=0,控制器将不会再 有任何输出。而电机没有了输入其速度将开始下降,当电机速度开始下降时,控制器的误差又≠0,此时控制器又开始输出控制量。这样往复振荡最终停下的速度≠目标速度,也就是产生了静差。而消除 静差的方法就是加入积分项,积分项拥有“记忆”,主要用于持续跟踪过去,当稳态静差产生后,积分项将负责弥补这之间的误差。相比之下微分项的作用微乎其微,可以忽略。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





