
资料下载


Arduino婴儿手机
刘英
分享资料个
描述
我的第一个孩子需要刺激、放松和大量的形状/颜色/运动数据来开发他的大脑,所以我决定为他制造一个手机。
通常,我喜欢在开始之前将完整的项目概念化,但在这种情况下,我不知道什么会吸引他,所以它非常迭代并被破解在一起。我将主要根据结果编写本指南作为说明,但我将分享一些开发过程,因为我认为它对任何想要构建移动设备的人都有用,特别是如果你想从中挑选想法这同时构建了一些独特的东西。
发展观念
我想要一个由伺服驱动的轻型物体来招待我的新室友。我希望它在他无聊和挑剔时引起他的注意,但也不要让他保持清醒。
大多数手机都直接挂在孩子面前,但我最关心的是保持安装系统简单,我不喜欢将一个物体直接悬挂在他的上方,并在婴儿床的一侧有一个悬臂式附件。
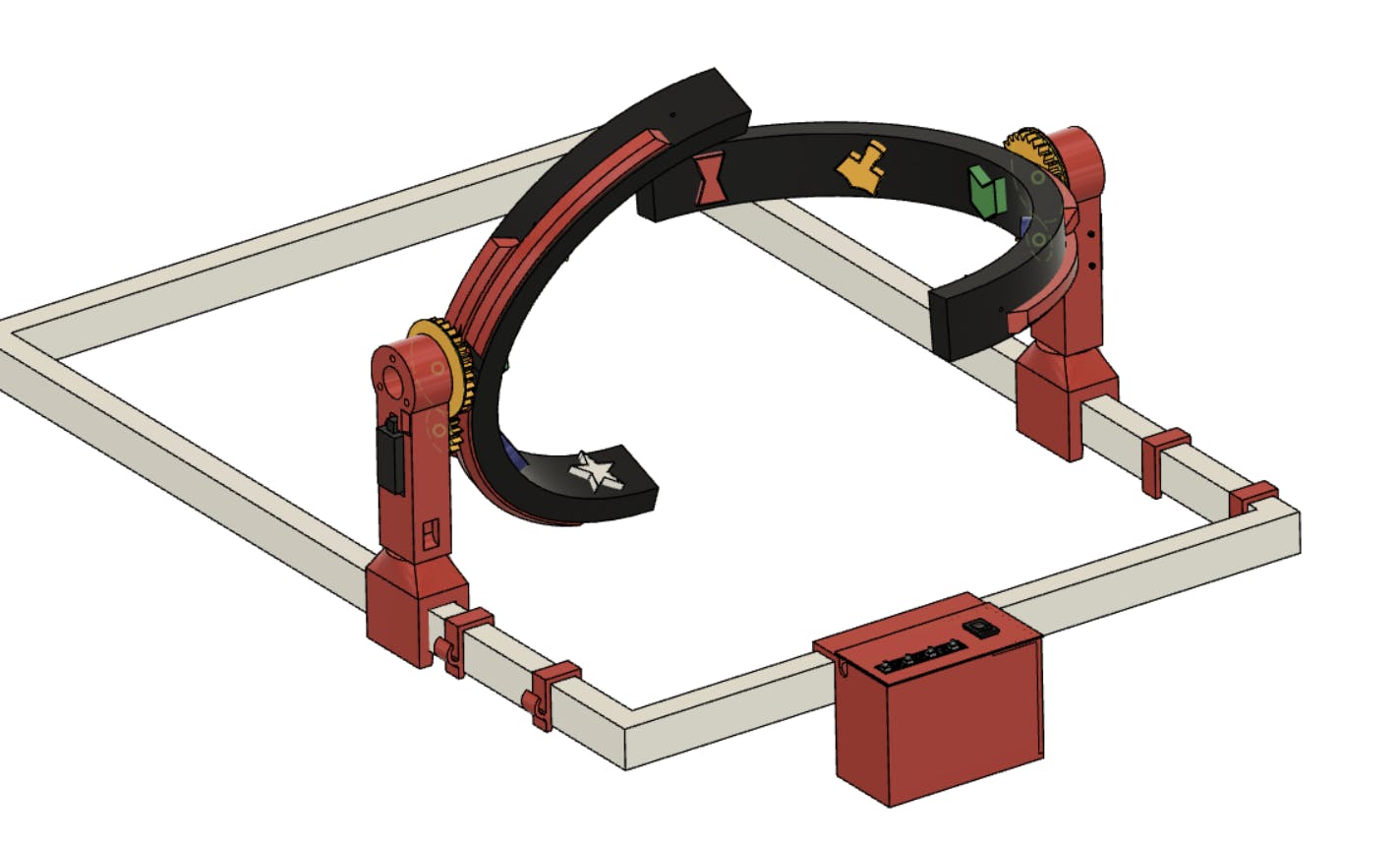
相反,我选择将移动元件连接到从婴儿床侧面垂直升起的柱子上。这导致了在柱子顶部有一个伺服器的想法,为了对称,我可以在每一侧都有一个。
这个概念让我想起了漫威电影中用来给巴基巴恩斯洗脑的椅子:
这让我觉得这是一个有趣的笑话,因为我丈夫和我都爱巴基,并且喜欢开玩笑说养育子女是一种善意的灌输形式。不过,更实际的是,在柱子顶部围绕电机旋转的两个半圆形臂在视觉上令人愉悦。
该项目最具挑战性的元素之一是开发手机的美学和行为。对于大多数功能设计,物理设置设计参数。但在这种情况下,该设备的实用性是通过我儿子对其娱乐价值和安抚他的能力的主观评价来衡量的。考虑到这一点,我看了一些商用手机,然后对婴儿会觉得什么有吸引力做出了最好的猜测。然后,我制作原型并进行迭代,看看他的反应是什么,并确保开发过程中的安全性。在 Calvin 的帮助下,我们能够制作出他显然很喜欢的东西,而且我相信这些东西不会对他造成伤害。
以下步骤介绍了构建机械臂、组装控制电子设备以及编写控制旋转和灯光的脚本。
第 1 步:构建机械臂
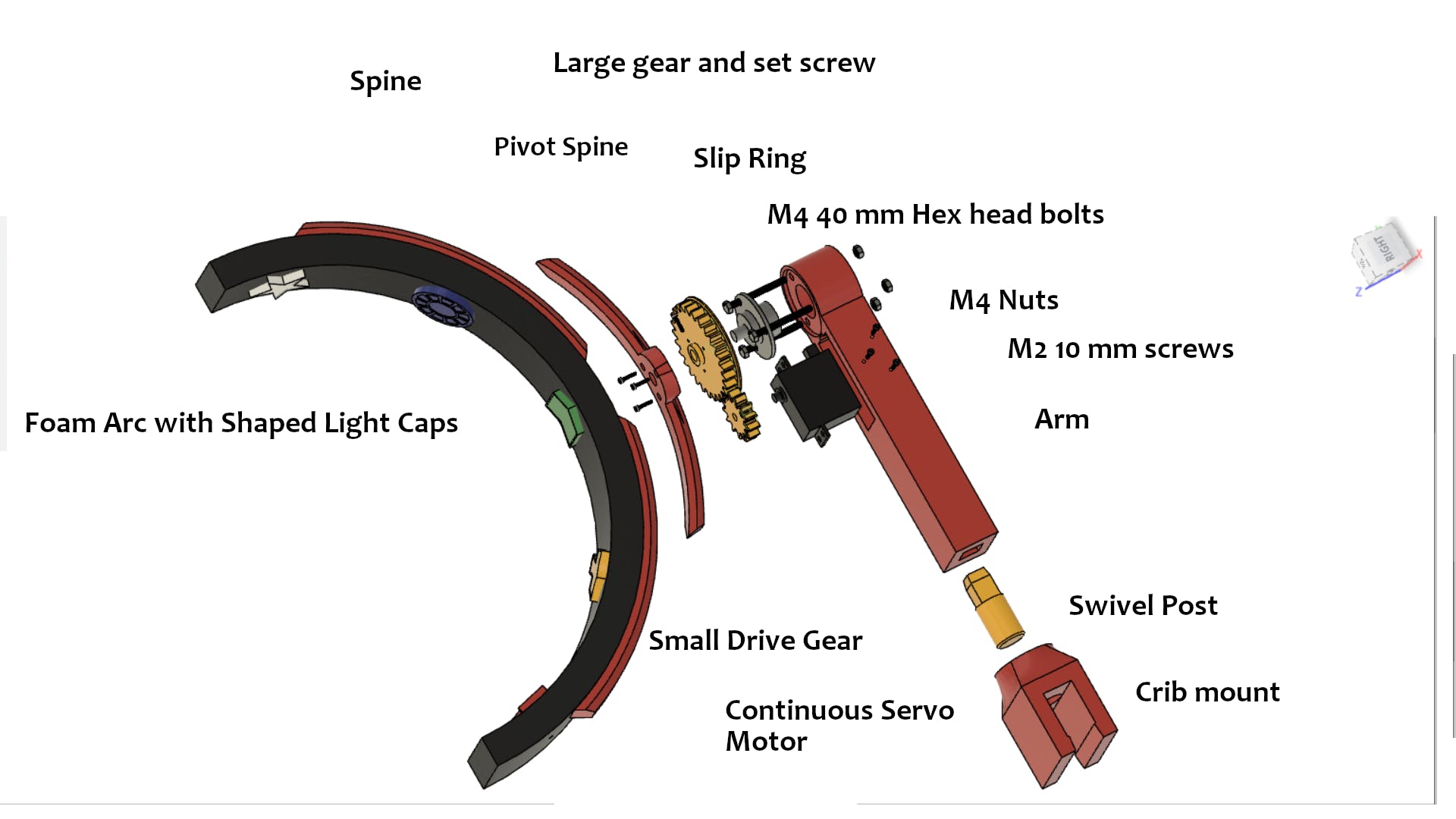
1.1:3D打印以下部分:
- 安装在婴儿床侧面的夹子 (x2)
- 每个臂都安装在其上的旋转销钉 (x2)
- 上臂 (x2)
- 大齿轮和小齿轮 (x2)
- 枢轴脊柱 (x2)
- 半圆弧的曲率刺 (x4)
- 具有有趣形状和颜色的灯帽
- 婴儿床夹导丝器 (x6)
这些部件在 Thingiverse 上列出:www.thingiverse.com/thing :4490957
1.2:组装泡沫半圆弧
从 EVA 泡沫垫上剪下四个 2 英寸长的条带。在旋转的刺上涂抹接触水泥,让胶水干燥 10 分钟左右,然后将其涂抹在其中一条切割条的中心,使泡沫弯曲。再重复两个标准刺,使泡沫具有一致的半径弧。然后将接触水泥涂在曲线的内表面和另一条泡沫条的一侧。让它干燥十分钟,然后将它们压在一起,将第二个泡沫条永久固定在第一个泡沫条上。再次重复此操作以获得两个半圆弧。
使用钻头在泡沫塑料上打孔,这些孔与枢轴脊上的孔对齐,这些孔将枢轴脊拧到大齿轮上,并将枢轴脊试拧到大齿轮上。将滑环拧到柱子的顶部。将小齿轮粘在和/或拧到伺服喇叭上,然后将喇叭和齿轮连接到伺服上。将其滑入到位并拧紧手臂侧面的三个固定螺钉,以便伺服电机转动大齿轮。
1.3:插入灯并将它们连接到滑环
标记您希望 LED 放置的位置,然后在泡沫中为它们戳孔。将一个电阻器焊接到每个并焊接从 LED 的正极和接地引脚引出的导线。沿着弧线的背面运行这些并将它们焊接到滑环上,确保标记哪种颜色连接到哪个 LED。
检查接线指南两次,然后将滑环和伺服电机的电线连接到 CAT5 插孔,以便来自控制模块的 CAT5 插头将每个 Arduino 引脚与正确的组件匹配(见下文)。
一旦所有的灯都被焊接和热缩,将它们插入泡沫中的孔中,这样它们就可以伸出你想要的位置,然后使用工艺刀进行切割,彩色灯罩上的标签将楔入。我发现不需要胶水。我用白色打印了帽子,并用锐利的颜色给它们上色,以节省更换灯丝的工作,但这样做没有错误的方法。
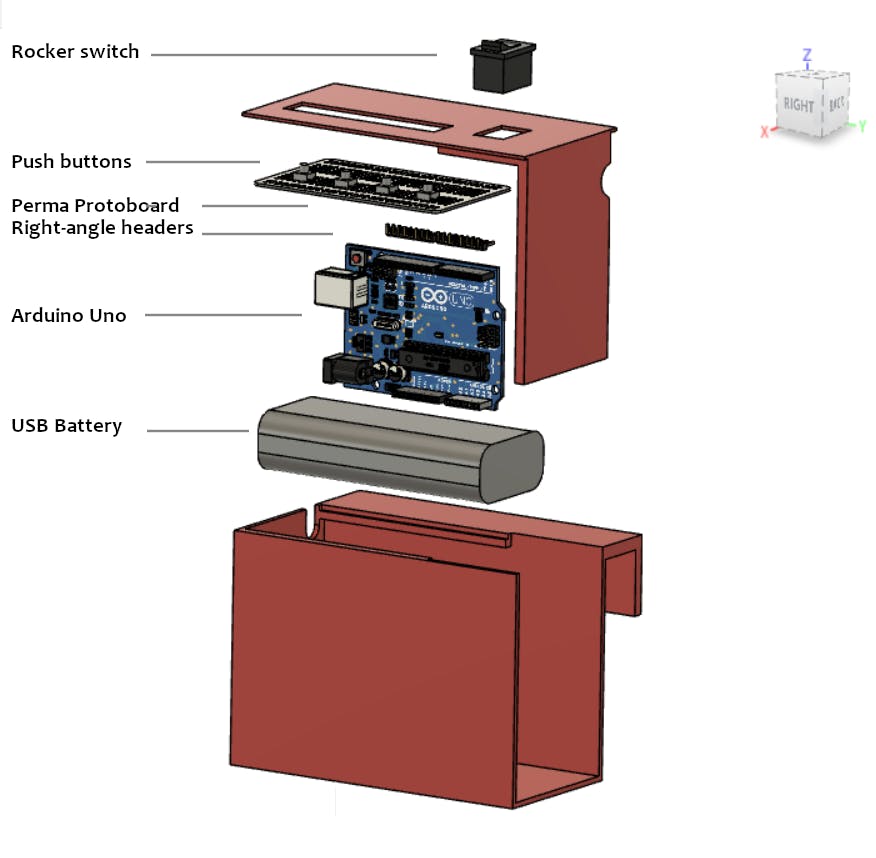
第二步:组装控制模块
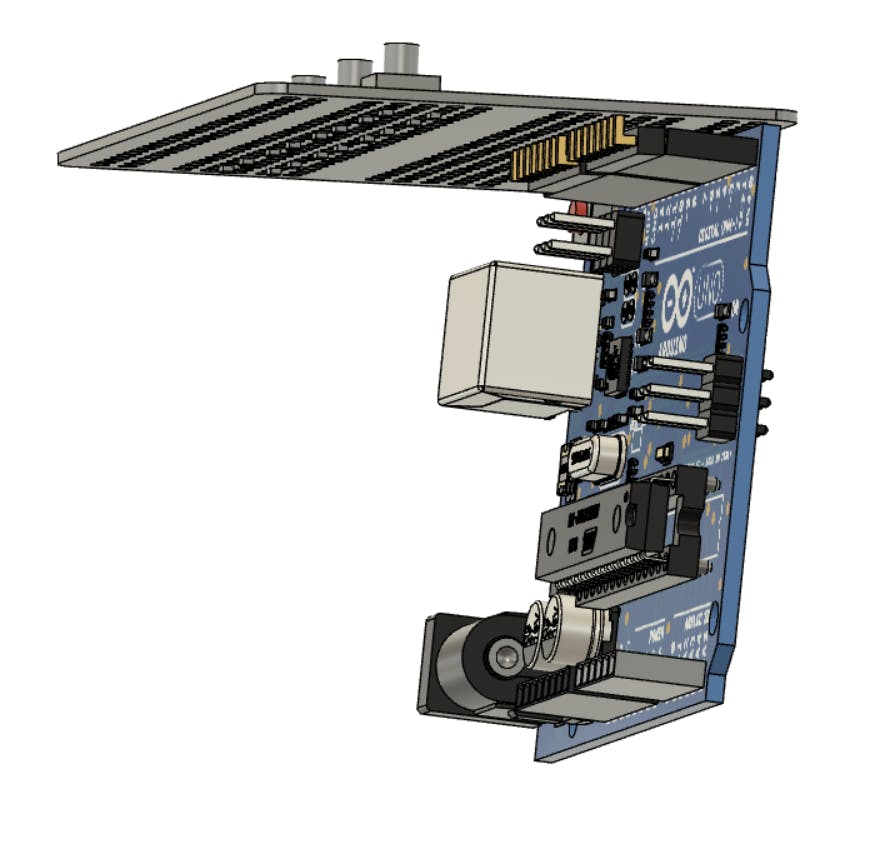
控制模块由一个 Arduino、几个按钮、一个带电源开关的 USB 电池以及将控制器连接到每个手臂的电线组成。控制模块使用 CAT5 以太网电缆连接到手臂,该电缆有 8 根电线,四处散落。您需要 (1) 确定哪些组件连接到哪些 Arduino 引脚,然后 (2) 决定如何将 Arduino 引脚接头连接到其他所有东西,(3) 确定控制器和手臂之间的电线需要多长,然后 (4) 开始构建。
2.1:将组件与引脚匹配
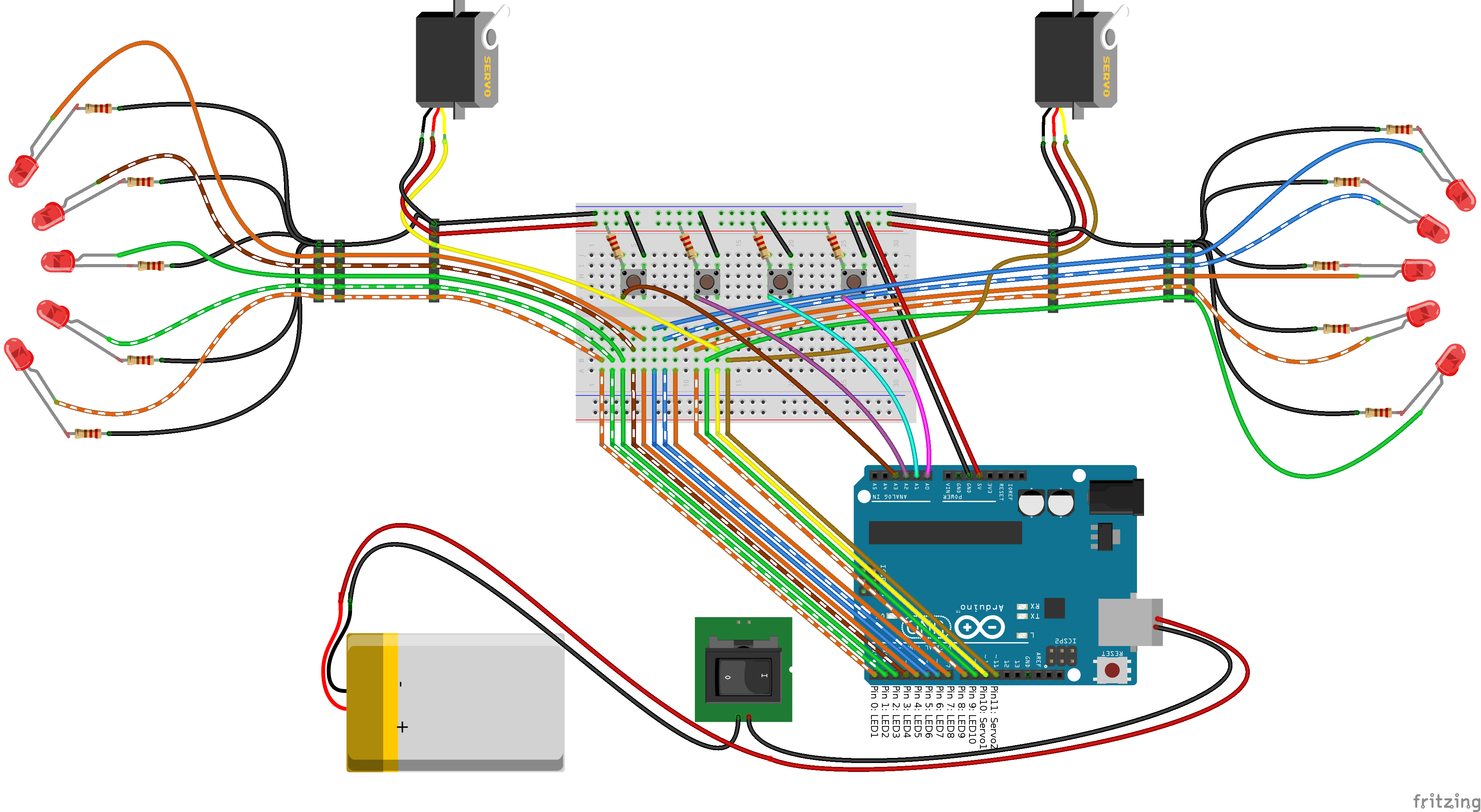
您可以在下面看到系统图和每个 Arduino 引脚连接到哪个组件的列表。
2.2:决定如何将 Arduino 连接到组件
我通过将直角接头引脚焊接到连接到主数字引脚的永久原型板上,然后将带有接头连接器的电线焊接到电源、接地和模拟引脚,将 Arduino 连接到其他电子设备。用于读取四个按钮。我认为更专业的方法是使用 Arduino 盾牌。您可以在下面看到我所做的模型。关键是您希望能够将按钮插入模拟引脚(加上电源和接地)以及从两条 CAT5 电缆(总共 16 根线)到数字引脚 0 - 11 的电线,以及两条电缆中的每一条都有 5V 引脚和一个接地引脚。
2.3:将 CAT5 电缆切割成一定长度
我的是每个 50 厘米(20 英寸)。解决方案相当简单,但无论如何都需要解决一些难题。
表达的主要担忧是它会与婴儿发生碰撞。此外,婴儿不会自发地坐起来。这是一个循序渐进的过程,直到他发展出能够伸手触摸它的能力。
此外,它的速度具有欺骗性。它比看起来更缓慢地移动。它的重量非常轻,电机也很弱。就算撞在卡尔文的脑袋上,也不会叫出声就停下来。最后,因为它在柱子上,任何碰撞都会导致整个手臂旋转,而不是对路径中的障碍物施加任何力。因此,即使电机很容易停止,它也不需要:任何障碍物所承受的力大致相当于从大约 6 英寸高处掉落毛绒玩具所产生的力。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






