
资料下载


构建一个球和光束控制系统
张旭
分享资料个
介绍
BallandBeam 项目于2019 年春季在美国国家应用科学与技术研究所 ( INSAT)开发。
访问我的个人作品集:karembenchikha.me
检查 GitHub 上的项目:https ://github.com/KaremBenChikha/BallandBeam
这是一个学校项目。任务是构建一个球和光束控制系统。
一个乒乓球坐在横梁的顶部,根据横梁的间距前后滚动。音高由连接到 Arduino 的伺服系统控制。球的位置由安装在光束末端的距离传感器测量。
PID 控制器用于控制球在梁上的位置。
物理设置
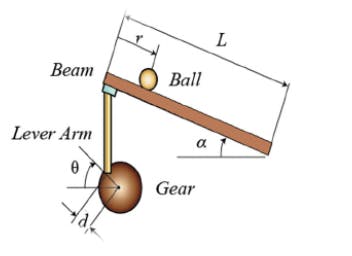
一个球被放置在一个梁上,见下图,它可以沿梁的长度以 1 个自由度滚动。杠杆臂一端连接到横梁,另一端连接伺服齿轮。当伺服齿轮转动角度θ时,杠杆将光束的角度改变α。
当角度从水平位置改变时,重力使球沿梁滚动。将为该系统设计一个控制器,以便可以操纵球的位置。
因此传递函数变为如下等式所示:
机械部分
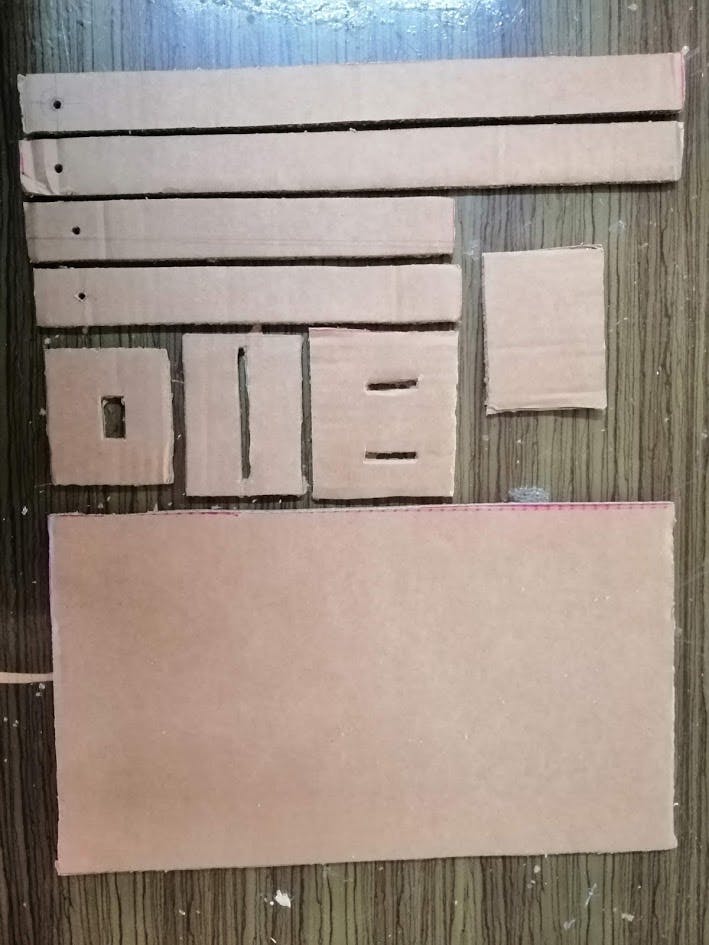
一个简单的卡片盒就可以完成这项工作。
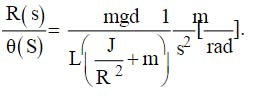
- 底座支撑(40 厘米 x 20 厘米)
- 2 x 支撑(20 厘米)
- 2 x 光束(34 厘米)
- 伺服马达喇叭 (5 cm)
- 杠杆喇叭(10 厘米)
- 乒乓球
这是它的样子:
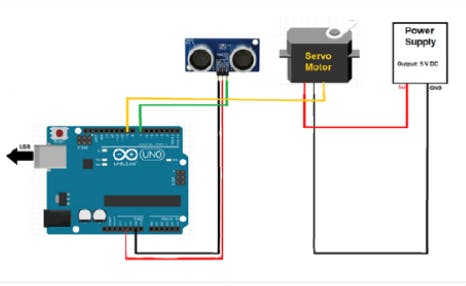
电气部分
你会需要:
- 阿杜诺(纳米)
- 伺服电机
- 夏普传感器
- 电缆和跳线
- 面包板
接线应如下所示:
LabVIEW部分
首先,您应该知道如何在 Arduino 和 Linux 之间建立正确的通信。如果没有,请检查此链接。
因此,控制系统的基本仪表板应如下所示:
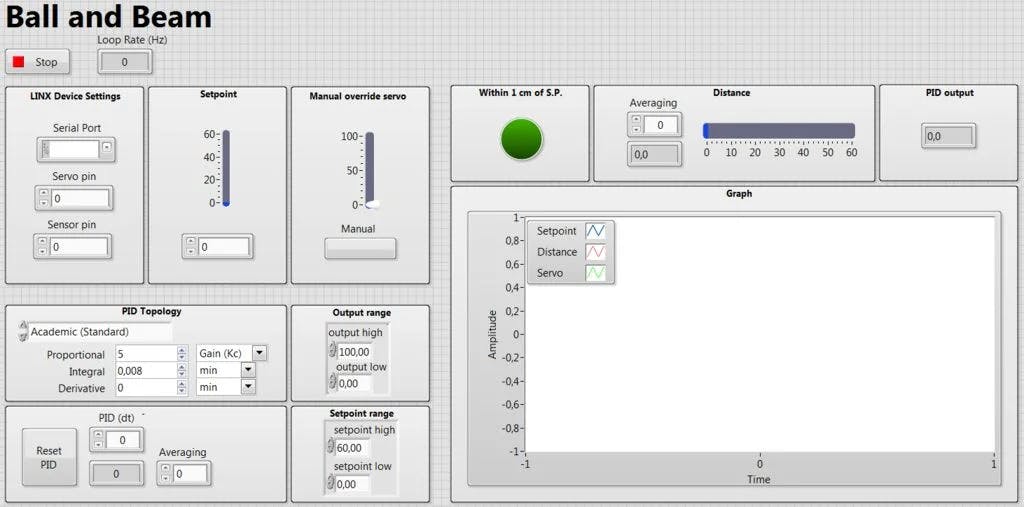
您应该使用正确的值调整控制参数。
如果您不想再知道如何确定这些系数,请导航至此链接。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





