
资料下载


Zybo Z7-20上的汽车检测系统
卞轮辉
分享资料个
描述
介绍
如今,ADAS(自适应驾驶辅助系统)和自动驾驶汽车的话题越来越普遍。大公司和普通人都努力为这些目的创建有效的系统。
在这个领域,人们投入时间的最重要的事情之一就是目标检测。一辆应该自行驾驶的汽车必须知道周围有什么物体。有三种最常用于此类目的的传感器。它是 LiDAR(光探测和测距)、RADAR(无线电探测和测距)和摄像头。必须获取并正确处理来自该传感器的数据以检测物体。非常常见的方法是融合来自许多此类传感器的数据。它使系统输出信息具有更高的可靠性。
通常,当算法有效地检测对象时,它也很耗时。然而,在异构平台上实现此类算法的试验很少。在我们的项目中,我们想证明它是可以做到的,并且可以带来可见的利润。
该项目的目的是实现基于激光雷达和摄像头数据融合的硬件-软件汽车检测系统。目标平台是Zybo Z7-20。
第一步:选择数据处理算法
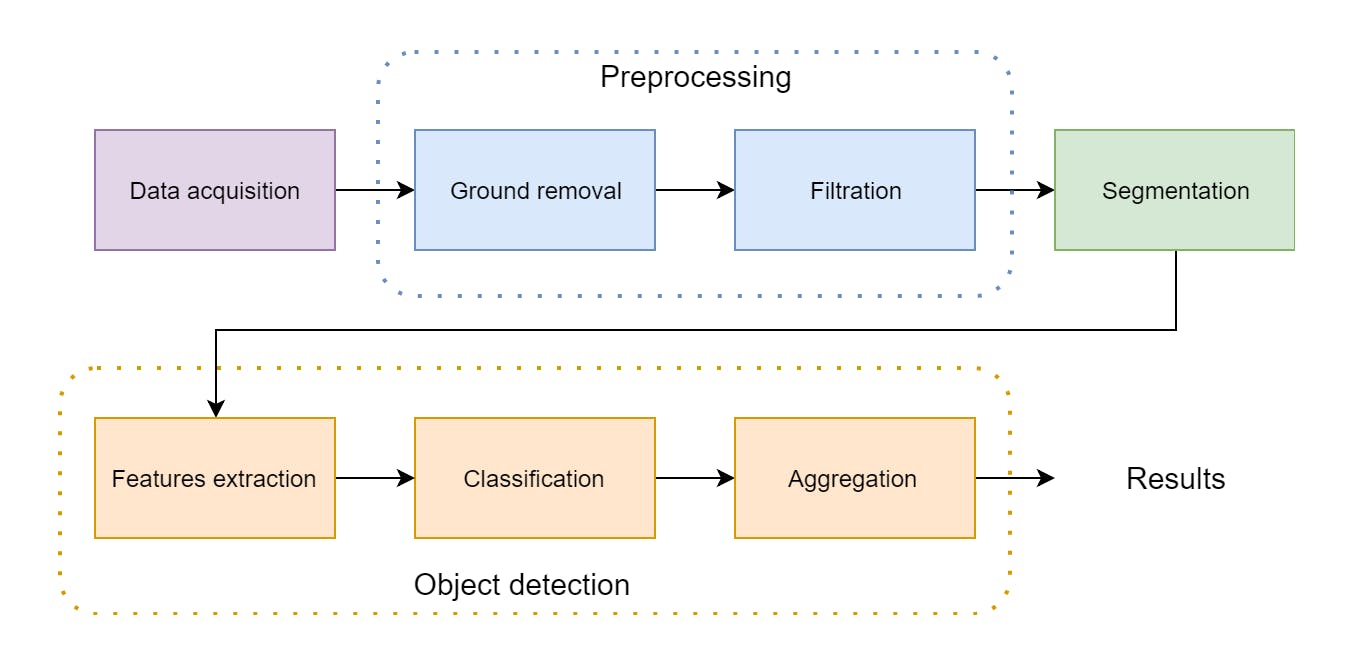
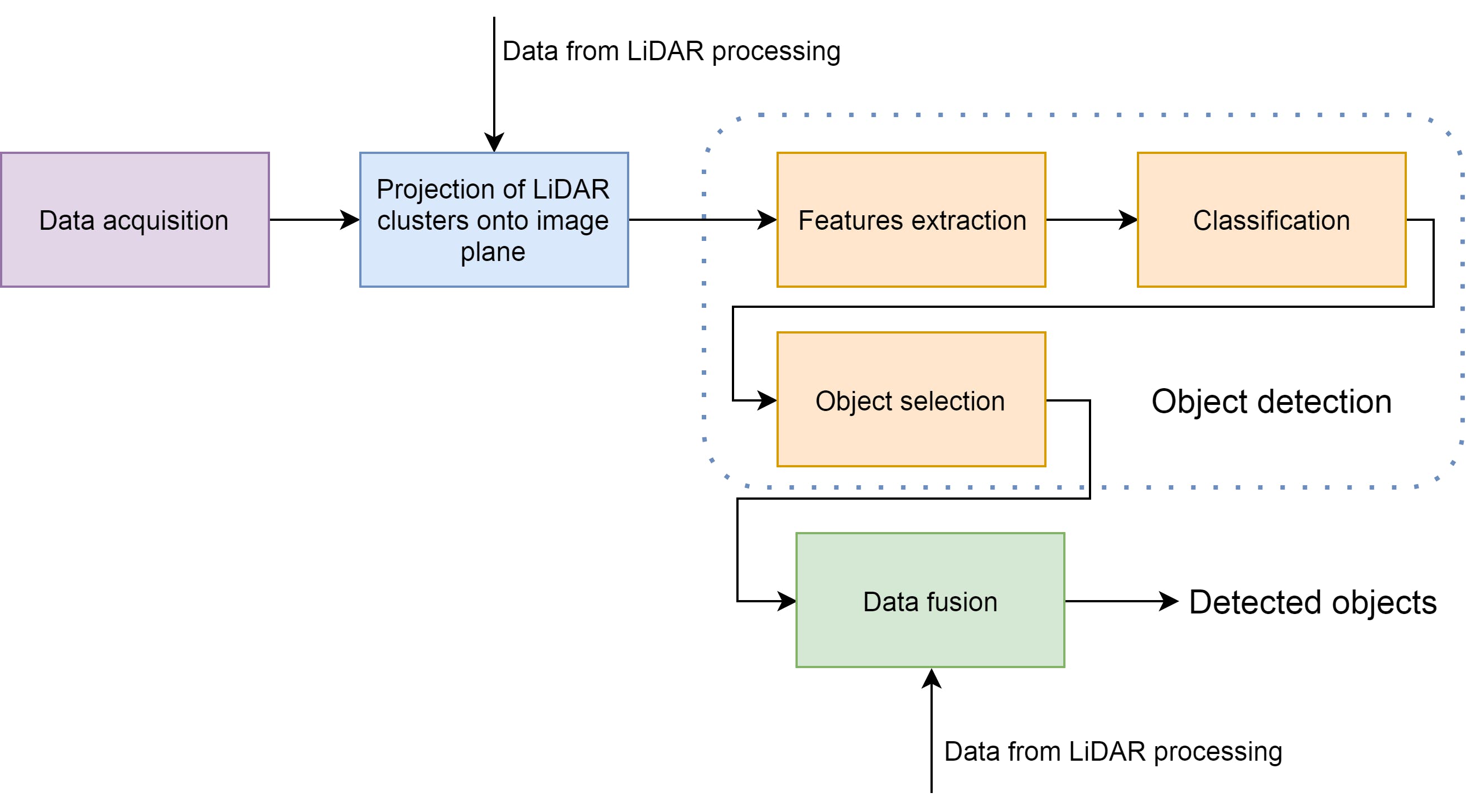
第一步是决定我们应该如何检测汽车。我们搜索了足够的文献——文章、会议论文等。在评估(在 MATLAB 中)和算法分析之后,我们选择了图 1 和图 2 中显示的那个。
第 2 步:MATLAB 中的软件模型
下一步是创建参考模型。基础是第 1 步的评估版本。我们对其进行了更改,以便它可以很好地适应 FPGA 架构,同时考虑到数据来自 LiDAR 的方式。
我们改变的最重要的事情:
- 持续分析 LiDAR 扫描,而不是缓冲和分析整个 360 度点云,
- 激光雷达周围的空间是如何划分成簇的,
- LiDAR 集群聚合是如何完成的。
第三步:硬件和软件部分的算法划分
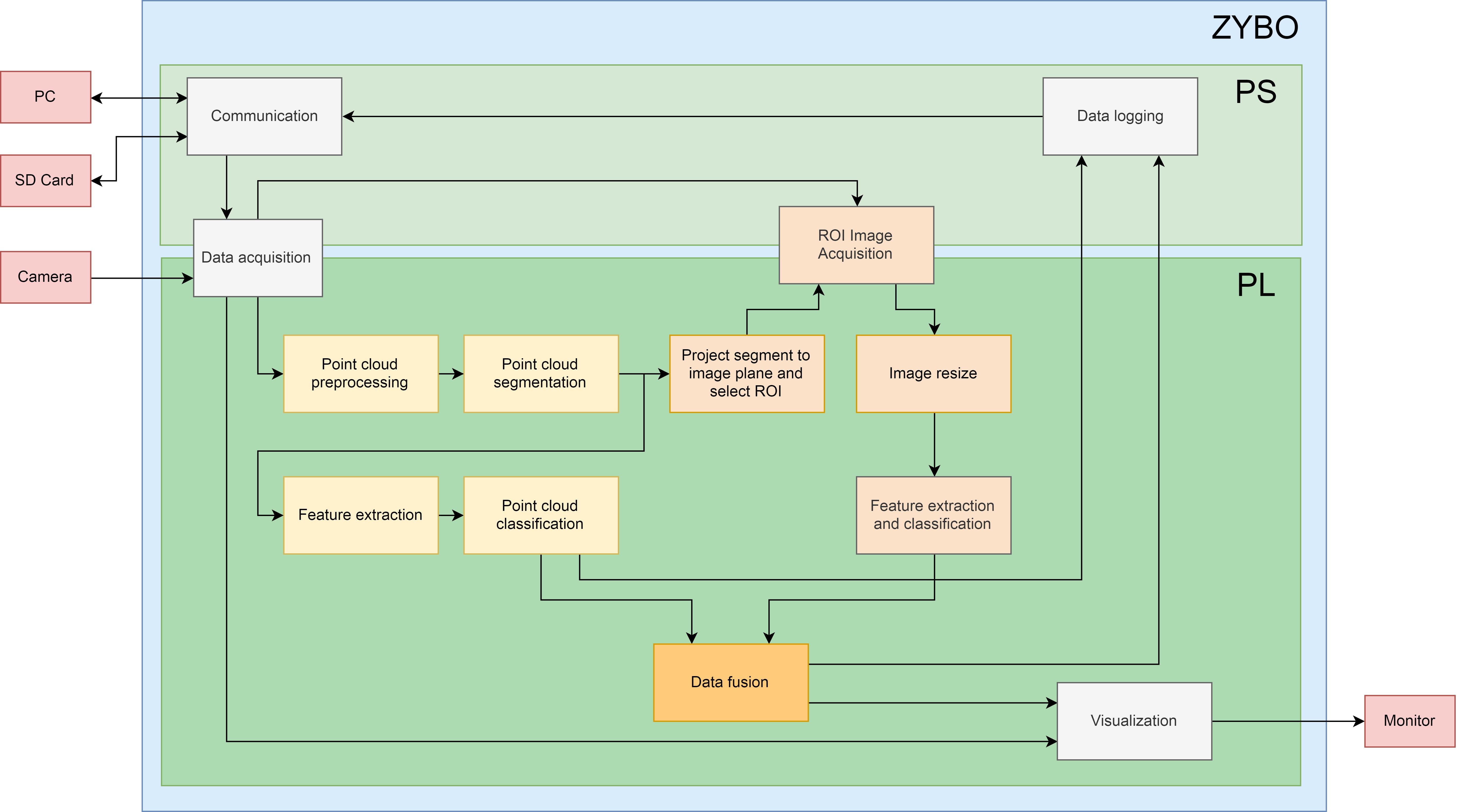
Zybo Z7-20 的核心是异构 Zynq-7000,其中包含可编程逻辑 (PL) 和 ARM 处理器 (PS)。我们利用它并将算法的这些部分转移到 PS,这些部分具有更多的顺序“性质”。下图(图 3)显示了分为 PS 和 PL 部分的算法方案。
第四步:硬件部分(PL)的实现
如何运行代码?
包含最新代码的 Git 存储库已附加到该项目。它至少需要版本。Vivado 2018.2。用户应该选择包含他想要调查的部分项目的文件夹。当前版本仅提供行为模拟的可能性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






