
资料下载


使用Genode控制Zybo Z7 GPIO
刘敏
分享资料个
描述
Zybo Z7 带有一组用户控制的 LED、按钮和开关。所有这些都可以通过 Zynq 的 GPIO 控制器访问。然而,只有一个 LED 和两个按钮直接连接到处理系统 (PS),其余连接到可编程逻辑 (PL)。因此,在这个项目中,我不仅会展示如何控制 Zynq 的 GPIO,还会展示如何使用 GPIO 和 MMIO 与 PL 交互。
请注意,我假设您知道如何在 Zybo Z7 上运行 Genode。如果没有,请查看我的Zybo Z7 项目入门。
建筑学
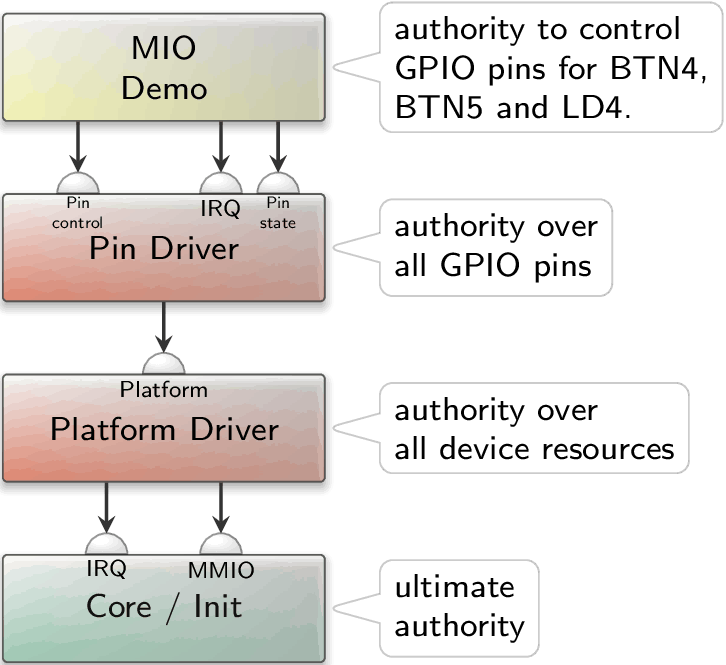
下图说明了 Genode 中用于引脚级访问的一般架构。最底层是Core / Init组件,它拥有最终权限并且不受访问策略限制。它只是通过 IRQ 和 MMIO 服务向平台驱动程序提供所有设备资源的权限。后者提供平台服务,特定组件可以通过该服务获得对单个设备的授权。在这种情况下,引脚驱动程序获得对 GPIO 控制器的权限。同样,它提供了Pin control 、Pin state和IRQ服务,用于将各个引脚的写入、读取和通知权限传递给特定组件。在此示例中,我将实现一个 MIO 演示组件,该组件控制 Zybo Z7 板的按钮 4、按钮 5 和 LED 4 的 PS 可访问 GPIO 引脚。
测试引脚驱动器
Genode 21.11 引入了Pin I/O 会话接口,该接口首先由A64 SoC 的引脚驱动程序实现。使用 A64 引脚驱动程序作为蓝图,我效仿并为 Zynq SoC 实现了引脚驱动程序。由于出色的基础工作,我能够重用大部分代码并专注于特定于 SoC 的部分。
有了手边的引脚驱动器,我已经能够控制 PS 可访问的 LED 和按钮。因此,我编写了一个微型 MIO 演示组件。按下按钮 4 时组件应打开 LED,按下按钮 5 时关闭 LED。它还会生成反映 LED 状态的状态报告。
编写组件的第一步是创建一个target.mk文件。惯例是根据组件的类型将组件的源代码放在src/app、src/server、src/drivers或src/test 的子目录中。在我的genode-zynq 存储库的克隆中,我因此创建了包含以下内容的文件src/app/zynq_gpio_demo/mio/target.mk 。请注意,因为我要实现多个相关组件,所以我将所有组件捆绑在一个公共子目录zynq_gpio_demo 中。
TARGET := zybo_gpio_demo_mio
SRC_CC := main.cc
LIBS := base
target.mk包含一些声明,这些声明将在编译组件时由Genode的构建系统解释。第一行指定目标二进制文件的名称。第二行说明应将哪些源文件传递给 C++ 编译器。在第三行中,我定义了库依赖项(表示 Genode 的基础 API)。base
接下来,我创建了main.cc文件。让我们从前几行开始。
/* Genode includes */
#include
#include
#include
#include
#include
namespace Demo {
using namespace Genode;
struct Main;
}
/* [...] see below */
void Component::construct(Genode::Env &env)
{
static Demo::Main main(env);
}
我们必须包含一些头文件:base/component.h头文件是实现本机 Genode 组件所必需的。接下来的三个包含是前面提到的由引脚驱动程序实现的引脚 I/O 会话接口所必需的。最后,os/reporter.h需要生成上述状态报告。
我进一步Main在单独的Demo名称空间中声明了一个对象。本地 Genode 组件没有作为main() 我们在 POSIX 程序中使用的入口点的功能。相反,入口点是Component::construct() 我简单地按Demo::Main对象实例化的方法。现在,让我们看一下它的实现。
struct Demo::Main { /* members */ Env &_env; Pin_state::Connection _btn4 { _env, "Btn4" }; Pin_state::Connection _btn5 { _env, "Btn5" }; Pin_control::Connection _led4 { _env, "Led4" }; Irq_connection _irq4 { _env, "Btn4" }; Irq_connection _irq5 { _env, "Btn5" }; Signal_handler_irq_handler { _env.ep(), *this, &Main::_handle_irq }; Expanding_reporter _reporter { _env, "state", "state" }; /* methods */ void _update_state(bool on) { _reporter.generate([&] (Genode::Xml_generator & xml) { xml.attribute("value", on ? "yes" : "no"); }); _led4.state(on); } void _handle_irq() { _irq4.ack_irq(); _irq5.ack_irq(); if (_btn4.state()) _update_state(true); else if (_btn5.state()) _update_state(false); } /* constructor */ Main(Env &env) : _env(env) { _update_state(false); _irq4.sigh(_irq_handler); _irq5.sigh(_irq_handler); _irq4.ack_irq(); _irq5.ack_irq(); } };
成员:首先,该Main对象持有一个引用,Genode::Env因为这是构建其他成员所必需的。为了访问按钮的输入引脚,我使用了Pin_state::Connection对象。传递给其构造函数的字符串称为会话标签,由 pin 驱动程序评估以应用匹配的访问控制策略(详情如下)。同样,为了访问 LED 的输出引脚,我使用了一个Pin_control::Connection对象。此外,因为我想收到按钮状态更改的通知,所以我Irq_connection为每个按钮添加了一个对象。这些伴随着一个Signal_handler将注册到 IRQ 连接的对象。此信号处理程序将调用该方法。最后,我正在使用状态报告。这_handle_irq()Expanding_reporterExpanding_reporter将两个字符串作为构造函数参数。第一个字符串指定顶级 XML 节点的名称(Genode 中的报告通常是 XML 格式的),而第二个字符串定义会话标签,可以将其视为报告的名称。
方法:该_update_state() 方法有助于设置 LED 的状态和更新组件的状态报告。只要任一按钮出现 IRQ,信号处理程序就会调用该方法。_handle_irq()此方法确认 IRQ 并评估按钮状态以相应地更新 LED 状态。
构造函数:构造函数非常简单。它设置初始 LED 状态,在两个 IRQ 连接上注册信号处理程序并确认任何挂起的 IRQ。
我们需要的下一个要素是运行脚本。在 Genode 中,运行脚本是对某个要执行的场景的定义。更准确地说,它包含有关要构建的组件以及如何组合它们以创建特定场景的信息。运行脚本还可以评估正在运行的系统的(串行)输出以检查错误。由于运行脚本位于run/目录中,因此我在 genode-zynq 存储库的克隆中创建了包含以下内容的文件run/zynq_gpio_demo.run 。
create_boot_directory
import_from_depot [depot_user]/src/[base_src] \
[depot_user]/src/init \
[depot_user]/src/report_rom \
[depot_user]/src/zynq_platform_drv \
[depot_user]/src/zynq_pin_drv \
[depot_user]/raw/[board]-devices
build { app/zybo_gpio_demo }
install_config {
<config>
<parent-provides>
<service name="LOG"/>
<service name="PD"/>
<service name="CPU"/>
<service name="ROM"/>
<service name="IO_MEM"/>
<service name="IRQ"/>
parent-provides>
<default caps="200"/>
<start name="report_rom">
<resource name="RAM" quantum="1M"/>
<provides>
<service name="Report"/>
<service name="ROM"/>
provides>
<route>
<service name="ROM"> <parent/> service>
<service name="CPU"> <parent/> service>
<service name="PD"> <parent/> service>
<service name="LOG"> <parent/> service>
route>
<config verbose="yes"/>
start>
<start name="platform_drv" managing_system="yes">
<binary name="zynq_platform_drv"/>
<resource name="RAM" quantum="1M"/>
<provides><service name="Platform"/>provides>
<config>
<policy label="zynq_pin_drv -> ">
<device name="gpio0"/>
policy>
config>
<route>
<any-service> <parent/> any-service>
route>
start>
<start name="zynq_pin_drv">
<resource name="RAM" quantum="1M"/>
<provides>
<service name="Pin_state"/>
<service name="Pin_control"/>
<service name="IRQ"/>
provides>
<route>
<service name="ROM"> <parent/> service>
<service name="CPU"> <parent/> service>
<service name="PD"> <parent/> service>
<service name="LOG"> <parent/> service>
<service name="Platform">
<child name="platform_drv"/>
service>
route>
<config>
<in name="Btn4" bank="1" index="18" irq="rising"/>
<in name="Btn5" bank="1" index="19" irq="rising"/>
<out name="Led4" bank="0" index="7" default="on"/>
<policy label_prefix="zybo_gpio_demo_mio -> Btn4" pin="Btn4"/>
<policy label_prefix="zybo_gpio_demo_mio -> Btn5" pin="Btn5"/>
<policy label_prefix="zybo_gpio_demo_mio -> Led4" pin="Led4"/>
config>
start>
<start name="zybo_gpio_demo_mio">
<resource name="RAM" quantum="1M"/>
<route>
<service name="Pin_control">
<child name="zynq_pin_drv"/>
service>
<service name="Pin_state">
<child name="zynq_pin_drv"/>
service>
<service name="IRQ">
<child name="zynq_pin_drv"/>
service>
<service name="report">
<child name="report_rom"/>
service>
<service name="ROM"> <parent/> service>
<service name="CPU"> <parent/> service>
<service name="PD"> <parent/> service>
<service name="LOG"> <parent/> service>
route>
<config/>
start>
config>
}
build_boot_image { zybo_gpio_demo_mio }
run_genode_until forever
我不想在这里详述所有细节。运行脚本指定要从仓库(Genode 的包管理)导入哪些档案,以及要从源代码树构建哪些组件。它还为顶级 init 组件安装配置。关于init的配置的详细解释请参考Genode手册的系统配置章节。但是,我们可以在没有深入了解的情况下确定该场景由四个部分组成:report_rom、platform_drv和。zynq_pin_drvzybo_gpio_demo_mio
report_rom:该组件提供一个ROM和一个Report服务。它允许组件发布它们的报告,这些报告可以通过 ROM 连接访问。因此,它实现了单写入器、多读取器方案。
platform_drv:这是一个驱动程序组件,可以最终控制硬件外围设备(例如 MMIO 设备)。根据其配置,它通过提供的平台服务将对各个设备的控制权传递给其他组件。平台驱动程序需要访问我从软件仓库导入的板特定设备ROM。它的配置包含基于标签的策略,这些策略将设备(由设备ROM定义)分配给相应的平台会话。在这里,被授予对设备的访问权限。zynq_pin_drvgpio0
zynq_pin_drv:这是引脚驱动程序。其配置为按钮指定了两个输入引脚,为 LED 指定了一个输出引脚。查看Zybo Z7 手册,我发现 LED 4 连接到 MIO 引脚 7,按钮 4 和 5 分别连接到 MIO 引脚 50 和 51。知道 GPIO bank 0 覆盖 MIO 引脚 0 到 31 而 bank 1 覆盖引脚 32 到 53,我最终得到了发布的配置。与平台驱动程序类似,对单个引脚的访问由基于标签的策略定义。
zybo_gpio_demo_mio:这是我上面实现的演示组件。请注意,我将它的和Pin_state会话请求路由到 pin 驱动程序。会话请求被路由到组件。Pin_controlIrqreportreport_rom
该场景的构建和运行如下:
build/arm_v7a$ make run/zybo_gpio_demo BOARD=zynq_zybo_z7 KERNEL=hw
通过此设置,我可以使用两个按钮打开/关闭 LED。在串行控制台上,我可以进一步看到以下输出:
[init -> report_rom] report 'zybo_gpio_demo_mio -> state'
[init -> report_rom]
[init -> report_rom] report 'zybo_gpio_demo_mio -> state'
[init -> report_rom] "yes"/>
并不壮观,但看到引脚驱动器工作时仍然令人满意。在下一步中,我为 FPGA 创建了一个自定义比特流来控制连接到 PL 的开关、按钮和 LED。
创建自定义比特流
为可编程逻辑实施复杂的定制设计可能会很繁琐,尤其是如果您是 FPGA 领域的新手。我最后一次使用赛灵思 FPGA 是在大约十年前,当时工具发生了很大变化。因此,我从一个非常简单的设计开始,以检查我的基本设置是否正确。
作为先决条件,我必须在单独的 Ubuntu VM 中安装 Vivado ML Standard。我对它占用的磁盘空间量 (~60GB) 感到震惊,因此不得不相应地增加 VM 大小。
作为起点,我遵循了本教程。由于它已经包含了 Vivado 的详细分步说明,因此我宁愿坚持对本文中的各个步骤进行简要总结。
在 Vivado 中,我打开了一个新项目并使用左侧的 Flow Navigator 创建了一个模块设计。在block design中,我添加了Zynq处理系统作为IP(intellectual property)核。添加 IP 核后,Vivado 通常会提供运行连接自动化以连接所有明显信号的选项。运行自动化将IP 核的接口DDR和接口连接到相应的(自动创建的)外部端口。FIXED_IO
在这一点上,我很好奇我的最低限度但无用的设计是否基本上是完整和正确的,因此点击了“验证设计”按钮。
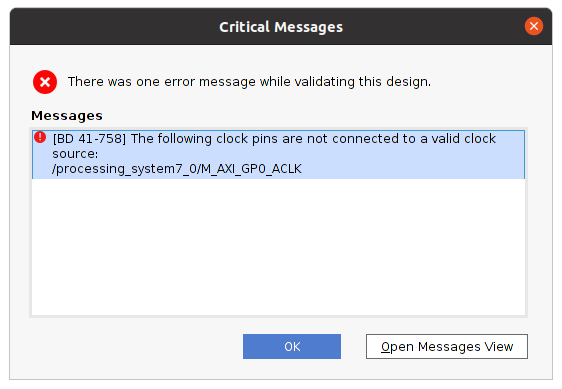
哎呀!显然,因为我没有按照上述教程的建议添加 AXI IP 核,连接自动化无法决定如何连接 AXI 时钟信号。通过锁定教程中的其他步骤,我能够决定 AXI 时钟信号应该连接到FCLK_CLK0IP 内核的接口。
修复此问题后,我生成了 HDL 包装器(右键单击模块设计)。不幸的是,我的 Vivado 安装在此过程中总是卡住,就像“初始化语言服务器”时一样。在工具→设置→工具设置→文本编辑器→语法检查中将语法检查从“Sigasi”更改为“Vivado”,在重新启动 Vivado 后为我解决了这个问题。
在这一点上,我开始偏离上述教程。我不想实例化 AXI_GPIO IP 内核(这需要引脚驱动程序的支持),而是想使用 SoC 的 GPIO 控制器与 PL 交互。这是可能的,因为 GPIO 控制器的 bank 2 和 3 通过 EMIO 接口连接到 PL。EMIO 信号只需要路由到 FPGA 的正确引脚。
通过双击 Zynq PS IP 内核,我在外设 I/O 引脚卡上启用了 GPIO EMIO。此外,在MIO 配置卡上,我将 EMIO GPIO 宽度设置为 12(用于 4 个开关、4 个 LED、4 个按钮)。通过这样做,IP 内核获得了一个GPIO_0接口。为了使它成为一个外部信号,我选择了名称并右击以从上下文菜单中选择Make external 。这创建了一个名为连接到 IP 内核的外部接口。GPIO_0_0由于 GPIO 信号是三态的,外部信号将由gpio_0_0_tri_ioVivado 命名。我通过查看 HDL 包装器(在重新生成它之后)仔细检查了这个命名方案。
最后,我添加了一个 Xilinx 设计约束 (XDC) 文件以将信号绑定gpio_0_0_tri_io 到那些实际连接到开关/LED/按钮的设备引脚。幸运的是,Digilent为其电路板提供了主文件。使用主文件,只需取消注释个别行并插入相应的信号名称。我通过添加源对话框添加了 Zybo-Z7-Master 文件,取消了 LED、按钮和开关行的注释,并将信号名称插入gpio_0_0_tri_io[0]到gpio_0_0_tri_io[11]. 您可以在上述教程中找到更详细的说明。
生成比特流时,我注意到 Vivado 占用了大量 RAM。由于我在单独的 Ubuntu VM 中运行该工具,这有时会导致无法解释的构建错误。向 VM 添加另一个 GB 的 RAM 并将作业数量减少到 1 对我来说是个窍门。最终,我能够通过File → Export → Export Bitstream File导出生成的比特流文件。
在启动时加载比特流
由于 FPGA 使用易失性存储器来存储其编程,因此必须在每次通电后重新编程。比特流文件包含必要的(特定于设备的)信息。最简单的方法是让引导加载程序负责加载比特流。Xilinx 的 FSBL 和 u-boot 对此提供支持。当使用相应的配置选项编译时,您可以使用 u-boot 的fpga命令加载比特流。有两个子命令:load和loadb。前者需要原始比特流 (.bin),例如通过回读获取的比特流。后者需要 Vivado 导出的 a.bit 文件。与原始比特流相比,此文件具有不同的字节顺序并包含文件头。
为了简化启动时的比特流加载,我在 u-boot 的默认环境中添加了两个命令,分别检查fpga.bin 。fpga.bit文件,如果存在,fpga在启动到 Genode 之前执行相应的命令。此外,您可以通过将以下行添加到您的etc/build.conf来使用比特流填充 SD 卡映像。
RUN_OPT_zybo += --image-uboot-bitstream "/path/to/bitstream.bit"
测试比特流
为了测试比特流,我实现了一个zybo_gpio_demo_sw组件,它控制开关和每个开关旁边的 LED。代码非常简单。您可以在genode-zynq 存储库中找到它。
我还在run/zybo_gpio_demo.run脚本中添加了以下启动节点:
<start name="zybo_gpio_demo_sw">
<resource name="RAM" quantum="1M"/>
<route>
<service name="Pin_control"><child name="zynq_pin_drv"/> service>
<service name="Pin_state"> <child name="zynq_pin_drv"/> service>
<service name="IRQ"> <child name="zynq_pin_drv"/> service>
<service name="ROM"> <parent/> service>
<service name="CPU"> <parent/> service>
<service name="PD"> <parent/> service>
<service name="LOG"> <parent/> service>
route>
<config/>
start>
此外,更有趣的是,我修改了 pin-driver 配置以添加相应的策略:
<config>
<in name="Btn4" bank="1" index="18" irq="rising"/>
<in name="Btn5" bank="1" index="19" irq="rising"/>
<out name="Led4" bank="0" index="7" default="on"/>
<policy label="zybo_gpio_demo_mio -> Btn4" pin="Btn4"/>
<policy label="zybo_gpio_demo_mio -> Btn5" pin="Btn5"/>
<policy label="zybo_gpio_demo_mio -> Led4" pin="Led4"/>
<in name="Sw0" bank="2" index="0" irq="edges"/>
<in name="Sw1" bank="2" index="1" irq="edges"/>
<in name="Sw2" bank="2" index="2" irq="edges"/>
<in name="Sw3" bank="2" index="3" irq="edges"/>
<out name="Led0" bank="2" index="8" default="off"/>
<out name="Led1" bank="2" index="9" default="off"/>
<out name="Led2" bank="2" index="10" default="off"/>
<out name="Led3" bank="2" index="11" default="off"/>
<policy label="zybo_gpio_demo_sw -> Sw0" pin="Sw0"/>
<policy label="zybo_gpio_demo_sw -> Sw1" pin="Sw1"/>
<policy label="zybo_gpio_demo_sw -> Sw2" pin="Sw2"/>
<policy label="zybo_gpio_demo_sw -> Sw3" pin="Sw3"/>
<policy label="zybo_gpio_demo_sw -> Led0" pin="Led0"/>
<policy label="zybo_gpio_demo_sw -> Led1" pin="Led1"/>
<policy label="zybo_gpio_demo_sw -> Led2" pin="Led2"/>
<policy label="zybo_gpio_demo_sw -> Led3" pin="Led3"/>
config>
因为我想在上升沿和下降沿触发中断,所以我使用了开关输入引脚。irq="edges"
启用 RGB LED
到目前为止,我故意忽略了 Zybo Z7-20 (Z7-10) 上两个(一个)RGB LED 的存在。其中每一个实际上都由一个绿色、一个蓝色和一个红色 LED 组成。原则上,这些 LED 可以像其他 LED 一样进行控制。然而,由于它们的亮度需要通过脉宽调制 (PWM) 进行调节,因此为这项工作实施定制 IP 内核更为明智。这在本故事的第 2 部分中有所介绍,其中还包括使用我的预构建比特流再现完整 GPIO 演示的说明。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




