
资料下载


方案选择说明
4621321
分享资料个
方案选择说明
方案选择:目前常见的有超声波短距离测距,毫米波雷达长距离测距,激光测距,摄像系统测距等几种方法,按照常规技术的应用有以下几种方案可供选择:
方案1、采用毫米波雷达。优点:适合长距离测距。缺点:成本比较高,信号处理难度高。不适合处理短距离测距。
方案2、红外测距。优点:成本低,精度高。缺点:测量距离较近且受环境影响较大。
方案3、激光测距。优点:精度最高,稳定性好,适合远距离测量。缺点:成本高,技术要求太高。
方案4、摄像系统测距:优点:能比较直观观察到车辆后面的实际情况。缺点:视频信号处理复杂,涉及到数字图像处理等,成本较高,一般消费者很难接受。
方案5、超声波测距。优点:原理简单,成本低,制作方便,适合在一般短距离的测距,其最佳距离为4~5米。缺点:有一定局限性(这时因为超声波的传输速度受天气影响较大,不同的天气条件下传播速度不一样;对于远距离的障碍物,由于反射波过于微弱,使得灵敏度下降)。
本次倒车雷达的设计主要应用的技术是超声波测距技术。目前国内一般使用专用集成电路设计超声波测距仪,但是集成电路的成本很高,并且没有显示操作使用不方便。本方案以AT89S52单片机为核心的低成本、高精度、微型化数字显示超声波测距仪的硬件电路和软件设计方法。实际证明该仪器工作稳定,性能良好。
系统总体方案的设计
本系统由超声波发射、回波信号接收、温度测量、显示和报警、电源等硬件电路部分以及相应的软件部分构成。系统原理框图,如图1所示。
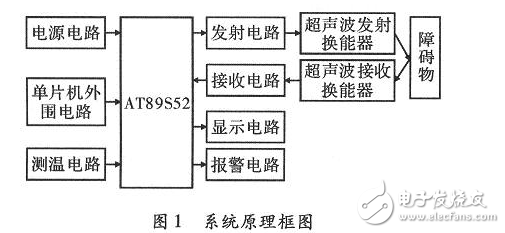
整个系统由单片机AT89S52控制,超声波传感器采用收发分体式,分别是一支超声波发射换能器TCT40-16T和一支超声波接收换能器TCT40-16R。超声波信号通过超声波发射换能器发射至空气中,遇被测物反射后回波被超声波接收换能器接收。进行相关处理后,输入单片机的INT0脚产生中断,计算中间经历的时间,同时再根据具体的温度计算相应的声速,根据式(2)就可得出相应的距离用来显示,当然在一些场合也可根据需要,设置距离报警值。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





