
资料下载


×
两轴稳定平台大俯仰角状态控制技术研究王辉
消耗积分:1 |
格式:pdf |
大小:387KB |
2017-03-09
#Freedom
分享资料个
两轴稳定平台大俯仰角状态控制技术研究_王辉
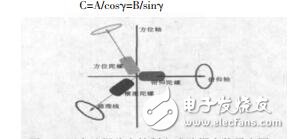
针对传统两轴陀螺稳定平台的不足, 本文提出了三正交陀螺稳定控制方式(图 3 所示),即在俯仰框架上安装三个正交的单自由度陀螺进行惯性角速率的测量, 其中一个陀螺用于敏感俯仰方向上的角速率, 另外两个正交的陀螺共同敏感方位轴的惯性角速率。在稳定平台具体的控制过程中,当瞄准线处于水平位置附近时,平台方位轴与瞄准线所在的平面近似垂直,由于方位陀螺的角速率敏感轴始终垂直于瞄准线所在的平面, 因此此时可以通过方位陀螺完成对平台方位轴角速率的敏感。当瞄准线处于垂直位置附近时, 平台方位轴与瞄准线所在的平面近似平行, 由于横滚陀螺的角速率敏感轴始终与瞄准线所在的平面平行,因此此时横滚陀螺敏感的角速率即为平台的方位角速率。当瞄准线处于水平和垂直位置之间与水平面的夹角为 γ 时(如图 3 所示位置), 采用方位和横滚两个陀螺的数据进行组合完成对平台方位角速率的敏感,设方位陀螺敏感到的惯性角速率为 A, 横滚陀螺敏感到的惯性角速率为 B, 稳定平台实际的方位角速率为 C,它们之间的关系如下式所示:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



