
资料下载


Multicore MCUs for Real-Time Control
分享资料个
Multicore MCUs for Real-Time Control
单核心微控制器可以多任务,如果时间被很好地定义和时间关键功能被划分,以便中断和定时器服务例程响应时间足够快,以处理手头的任务。然而,它的设计相当于杂耍。当一个球在空中不需要发球时,另一个球可能需要马上发球以保持球的移动。只要你足够快切换上下文,一切都很好。
当任务重叠时,可能很难迅速做出反应,例如几个同步和异步刺激同时发生。在这种情况下,只有少数几种选择。一个是更快的处理器。另一种方法是使用多个处理器,并将应用程序划分为时间可管理的或流水线的块。第三,在许多方面,最好的选择是采用单芯片双核心或多核处理器。
本文着眼于具有多个核心的处理器。这些部分允许任务执行人员将每个职责分配给每个核心,这样其他的分心不会从完成诸如时间关键控制环之类的任务所需的实时性能中消失。
Back of the bus
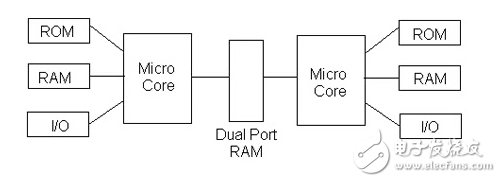
The key to understanding how to best choose a dual-core or multicore processor is how it uses or replicates resources. The most straightforward (and a very effective) approach is for each processing core to have its own “support staff,” including its own program and data memory, clock, and I/O. Shared peripherals would need to be claimed by the processor core currently using them (Figure 1), and dual-port memory serves well as an means of exchanging critical data.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章


