
资料下载


×
第十一届“恩智浦”杯全国大学生智能汽车竞赛
消耗积分:4 |
格式:pdf |
大小:1715KB |
2017-07-08
John
分享资料个
飞思卡尔智能小车
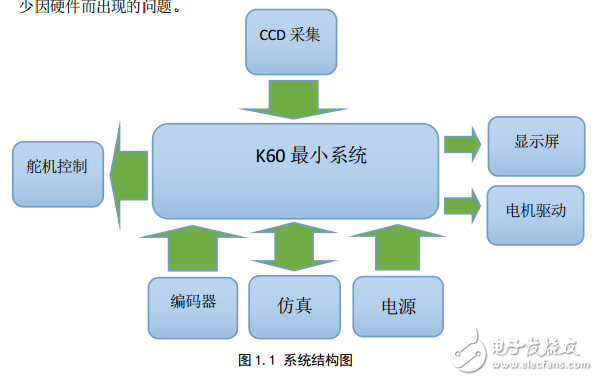
1.1 系统概述根据比赛的相关规定,本届智能车光电组采用大赛组委会统一提供的 C 车模,小车的基本结构大致可分为电源模块、传感器模块、电机驱动模块和控制模块等。小车的工作模式为:TSL1401CL 线性 CCD 采集赛道信息,将得到的模拟量经 AD 转换得到一组数字量,通过跳变沿算法对得到的数字量二值化,经滤波处理后获得主要的赛道信息,为舵机和电机的控制提供决策;转向舵机采用的是位置式 PD 控制;驱动电机采用的是增量式 PID 控制;通过编码器得到小车的速度,与速度 PID 形成闭环。起跑线检测模块用于控制智能车自动停车;参数调试模块包含 LCD 液晶显示器、串口调试助手等元器件,在这个可视化的操作界面中,可以根据控制策略对控制参数进行微调。根据智能车系统的基本要求,我们设计了系统结构图,如图 1.1 所示。在满足比赛要求的情况下,力求系统简单高效,因而在设计过程中尽量简化硬件结构,减少因硬件而出现的问题。
1.1 系统概述根据比赛的相关规定,本届智能车光电组采用大赛组委会统一提供的 C 车模,小车的基本结构大致可分为电源模块、传感器模块、电机驱动模块和控制模块等。小车的工作模式为:TSL1401CL 线性 CCD 采集赛道信息,将得到的模拟量经 AD 转换得到一组数字量,通过跳变沿算法对得到的数字量二值化,经滤波处理后获得主要的赛道信息,为舵机和电机的控制提供决策;转向舵机采用的是位置式 PD 控制;驱动电机采用的是增量式 PID 控制;通过编码器得到小车的速度,与速度 PID 形成闭环。起跑线检测模块用于控制智能车自动停车;参数调试模块包含 LCD 液晶显示器、串口调试助手等元器件,在这个可视化的操作界面中,可以根据控制策略对控制参数进行微调。根据智能车系统的基本要求,我们设计了系统结构图,如图 1.1 所示。在满足比赛要求的情况下,力求系统简单高效,因而在设计过程中尽量简化硬件结构,减少因硬件而出现的问题。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





