
资料下载


×
嵌入式智能小车的设计技巧
消耗积分:1 |
格式:rar |
大小:0.5 MB |
2017-10-15
分享资料个
前言
传统智能小车,特别是嵌入式系统,一般都是基于单片机或者ARM的嵌入式系统,基本上都由软件系统和硬件系统组成的,硬件系统方面,跟传统的搭建硬件环境一样,只能做相对裁剪和功能拓展,但是,本项目的课题是通过xilinx的FPGA开发板搭建嵌入式的硬件环境,从最小系统到IP核的添加,都是根据需要进行拓展的,实现一对一的拓展,不浪费资源,而且基于FPGA的嵌入式系统的最大有优点是,既有PFGA的并行执行效率,又有嵌入式软件的逻辑过程分析控制。
总体方案设计

图1 系统硬件结构框图
使用Spartan-6 的XC6SLX16 CSQ234 作为主控制器,传感器使用摄像头ov6620图像采集模块(兼测路径),使用超声波模块(HCSR04)测距,由于两者具有互补特性,所以能够很好的控制小车的运行状态,采用模糊算法计算出电机所需要的转速,和舵机的转角,从而实现稳步渐进。
1主控制器的选择
解决方案:采用可编程逻辑器件FPGA作为控制器。FPGA可以实现复杂的逻辑功能,规模大,密度高,体积小,稳定性高,IO资源丰富,易于外围功能扩展,随着FPGA的成本逐步降低,而且基于FPGA的嵌入式系统的搭建也成为可行,既有传统嵌入式的软件灵活性,也有FPGA的并行快速执行效率。
综上所述,我们选用的Nexys3 Spartan-6作为系统的主控制器。
2电源稳压芯片的选择
本系统中,Spartan-6主控制器。
解决方案:由于直流电机的功耗大,决定采用7.2V,2000mAh的电池为供电源,采用LM25xx系列单片集成开关电源作为降压芯片,可以提供大功率的输出,转换效率高,性能稳定。
3电机驱动选择
解决方案:采用BTS7960B搭建全桥驱动,可以满足大功率的输出,分别驱动两个电机。
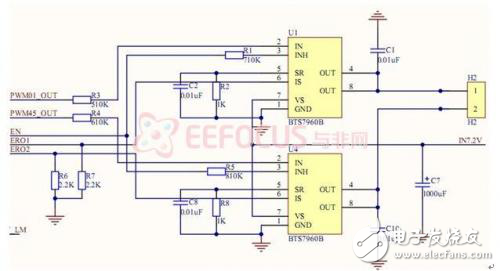
驱动模块电路
摄像头模块的选择
方案:采用数字摄像头ov6620,控制简单,价格合适,信号稳定。
传统智能小车,特别是嵌入式系统,一般都是基于单片机或者ARM的嵌入式系统,基本上都由软件系统和硬件系统组成的,硬件系统方面,跟传统的搭建硬件环境一样,只能做相对裁剪和功能拓展,但是,本项目的课题是通过xilinx的FPGA开发板搭建嵌入式的硬件环境,从最小系统到IP核的添加,都是根据需要进行拓展的,实现一对一的拓展,不浪费资源,而且基于FPGA的嵌入式系统的最大有优点是,既有PFGA的并行执行效率,又有嵌入式软件的逻辑过程分析控制。
总体方案设计
图1 系统硬件结构框图
使用Spartan-6 的XC6SLX16 CSQ234 作为主控制器,传感器使用摄像头ov6620图像采集模块(兼测路径),使用超声波模块(HCSR04)测距,由于两者具有互补特性,所以能够很好的控制小车的运行状态,采用模糊算法计算出电机所需要的转速,和舵机的转角,从而实现稳步渐进。
1主控制器的选择
解决方案:采用可编程逻辑器件FPGA作为控制器。FPGA可以实现复杂的逻辑功能,规模大,密度高,体积小,稳定性高,IO资源丰富,易于外围功能扩展,随着FPGA的成本逐步降低,而且基于FPGA的嵌入式系统的搭建也成为可行,既有传统嵌入式的软件灵活性,也有FPGA的并行快速执行效率。
综上所述,我们选用的Nexys3 Spartan-6作为系统的主控制器。
2电源稳压芯片的选择
本系统中,Spartan-6主控制器。
解决方案:由于直流电机的功耗大,决定采用7.2V,2000mAh的电池为供电源,采用LM25xx系列单片集成开关电源作为降压芯片,可以提供大功率的输出,转换效率高,性能稳定。
3电机驱动选择
解决方案:采用BTS7960B搭建全桥驱动,可以满足大功率的输出,分别驱动两个电机。
驱动模块电路
摄像头模块的选择
方案:采用数字摄像头ov6620,控制简单,价格合适,信号稳定。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





