
资料下载


基于TMS320F28335的小型导航计算机系统
分享资料个
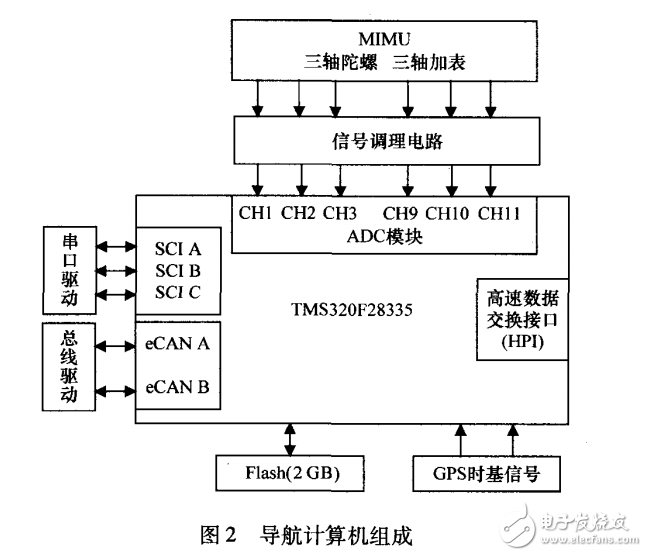
近几年来 ,基于 GPS、MEMS—IMU、磁通门罗盘 、里程计等传感器 的小型车载组合导航系统备受关 注,设计这一类系统所面临的挑战是如何在给定的导航精度下不断降低成本 、体积和功耗。作为这类小型导航系统的核心——导航计算机 ,大 多采用 双处理器 ,如DSP+ARM 、DSP+FPGA 、DSP+DSP ,或者 在FPGA上集成多个处 理器 等构架 实现 系统设计 ,其中 DSP完成数字信号处理和导航解算任务 ,另一块处理器完成数据采集 ,串口通信 、人机交互等功能。德州仪器(TI)公司 DSP产 品族 中 TMSF28X系列数字信号控制器 内嵌 32位 DSP核 ,最高运算速度达150MIPS,还配置了丰富的外设 ,兼备 了较强的运算能力和控制 、通信功能 ,但 由于其核 心运算 单元 为定点DSP J, 限制了它在需要大量浮点运算 的导航计算机收稿 日期 :2009—06—03作者简介 :刘明(1973一 ),男,云 南会泽人 ,高级 工程 师 ,博 士研究生 ,主要研 究领域为水下航行 器组合导航。中的应用 ,该公司随后推出的新型浮点数字信号控制器——TMS320F2833x系列 弥补 了这一缺 陷,片上集成 32位单精度浮点运算单元(FPU),每秒可做 300兆次浮点 运 算 J,是 目前 国 内导 航 系 统 普遍 采 用 的TMS320VC33浮点 型 DSP运算速 度 的两倍 ,其 串口、ADC、CAN总线等外设资源更为强大。本设计的小型车载导航计算机系统用于运动速度不大于 80km/h的车辆导航定位 ,为保证 GPS信号持续失效 1h内定位精度不超过规定值 ,导航系统对计算机具体要求包括 :实 时采集 3路异步 串 口数据 (更新率为 1S);以 10Hz采样率采集来 自 MIMU的 6路模拟量信号并支持 200h以上数据存储 ;能与上位机通过 CAN总线交换数据 ;运算能力需满足导航算法对硬 件 的 需 求 ,导 航 解 算 周 期 不 超 过 100 ms。TMS320F28335型 DSP(以下简称 F28335)运算速度和片上资源可满足上述要求 ,外扩 1GBFlash芯片实现大容量数据存储 ,预 留 HPI接 I=1线后还可方便地搭建TI高性能浮点 DSP阵列。设计 以单个 DSP系统实现了以往双系统 导航计算机同等的性能
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




