
资料下载


×
体感算法多功能蓝牙遥控器设计方案
消耗积分:1 |
格式:rar |
大小:0.6 MB |
2017-10-23
分享资料个
随着三网融合[1]的推进,多功能电视机顶盒已经进入了千家万户。电视除了能够收看电视节目外,视频点播、浏览网页、多媒体游戏、视频通话等功能也已经或即将被引入现代电视(或电视机顶盒)中。因此,仅具有按键功能的红外线遥控器已经无法满足如此众多的功能需求。为此,本文在普通遥控器的按键功能上增加了体感模块和语音模块,引入了体感控制算法,并以蓝牙协议作为通信方式,设计了一款具有体感控制功能的多功能遥控器。
1 系统总体设计
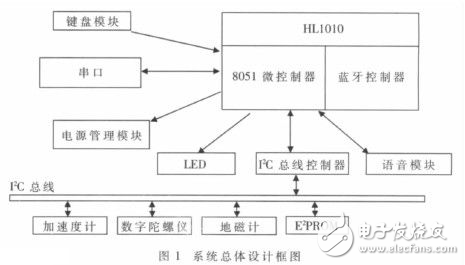
系统总体设计框图如图1所示。系统以HL1010芯片为控制核心,数字加速度传感器、数字陀螺仪和地磁计的数据通过I2C总线传至HL1010的8051微控制器,经过滤波和体感算法的处理,转化为主机服务端可用的数据,由HL1010的蓝牙控制器传至主机服务端。8051微控制器对键盘模块进行键盘扫描,将键值通过蓝牙发送至主机服务端外,还可以进行简单的音频压缩和解码,并通过蓝牙控制器和语音模块,完成遥控器和主机服务端的语音传输。遥控器中加入了E2PROM,用以存储程序和初始化数据以及蓝牙通信所需的重连信息。电源管理模块用以管理各个模块之间的电源,达到节能和延长电池使用寿命的作用。此外,串口接口为HL1010烧录程序的接口。
2 硬件设计
2.1 HL1010接口及外围电路
HL1010为蓝牙控制芯片,其特点是:除了具有独立的蓝牙控制核心外,还集成了一颗8051微控制器核心;具有28个独立的GPIO,两路语音输入输出通道;集成了I2C和SPI控制器,便于外围设备的扩展;内部固化了键盘扫描固件,可以通过简单的寄存器读写完成键盘扫描。
利用HL1010的外围电路,其中,GPIO10~GPIO17作为键盘行扫描,GPIO30~GPI-O37作为键盘列扫描;GPIO20~GPIO27为电源管理GPIO,分别通过软件来控制加速度传感器、数字陀螺仪、地磁计、E2PROM、扬声器、振动电机等模块的开关,以达到节能的作用;Pin44、45、48、49、50为语音模块接口,pin23、24为I2C接口。其余引脚为芯片的供电和射频匹配电路。HL1010的外围电路可参考文献[2]。
2.2 传感器模块
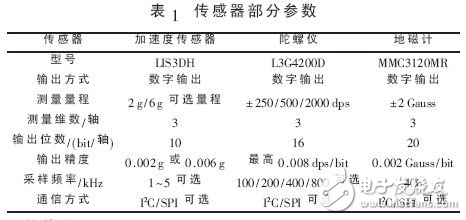
表1为本设计中传感器的部分参数,三个传感器都通过I2C总线与主控芯片进行交互,电路设计较为简单。
3 软件设计
3.1 体感算法
体感功能中最常用的是空中鼠标,即通过遥控器在空中的挥舞来控制屏幕中鼠标的运动,同时通过遥控器按键实现鼠标按键的操作,从而使用户能在远距离的三维空间中获得鼠标的操作功能。为了实现空中鼠标的功能,本文采用陀螺仪和加速度传感器。通过对陀螺仪得到的角速度数据分析得出遥控器的运动状态,作为空中鼠标的主要数据;通过对加速度传感器提供的加速度(主要是判断重力加速度的方向)数据进行分析,得到遥控器所处的姿态,从而对陀螺仪的数据进行坐标转换。陀螺仪所得数据中与重力加速度平行的方向为Y轴,与重力加速度垂直的为X轴,使最终空中鼠标的Y轴与重力加速度的平行方向始终一致、X轴与重力加速度的垂直方向始终一致。其数学方法如下[3-4]:
遥控器的加速度为as,大地系加速度为ai,两者的转化关系为:
ai=asRis (1)
其中,Ris为遥控器相对于大地系的余弦阵,其表达式为:
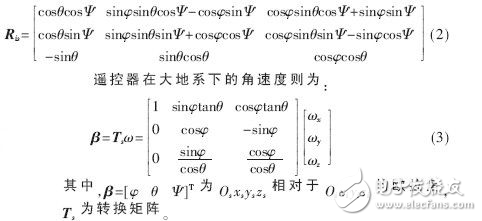
经过坐标转换后,无论使用者如何将遥控器握在手中(正握,反握,竖立,倒立等),空中鼠标的运动仅与使用者手臂的运动方向有关,而与遥控器的运动方向无关。
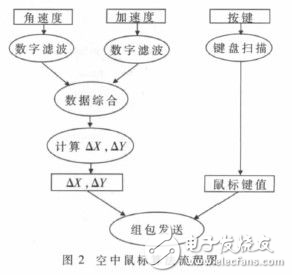
算法的主要流程为:(1)对角速度进行采样,并进行数字滤波;(2)对加速度进行采样,并进行数字滤波;(3)通过加速度传感器数据对陀螺仪的坐标轴进行旋转;(4)计算鼠标两个轴的偏移量;(5)通过键盘扫描得到鼠标按键键值;(6)通过HID协议将键值发送给服务端。数据流程如图2所示。
1 系统总体设计
系统总体设计框图如图1所示。系统以HL1010芯片为控制核心,数字加速度传感器、数字陀螺仪和地磁计的数据通过I2C总线传至HL1010的8051微控制器,经过滤波和体感算法的处理,转化为主机服务端可用的数据,由HL1010的蓝牙控制器传至主机服务端。8051微控制器对键盘模块进行键盘扫描,将键值通过蓝牙发送至主机服务端外,还可以进行简单的音频压缩和解码,并通过蓝牙控制器和语音模块,完成遥控器和主机服务端的语音传输。遥控器中加入了E2PROM,用以存储程序和初始化数据以及蓝牙通信所需的重连信息。电源管理模块用以管理各个模块之间的电源,达到节能和延长电池使用寿命的作用。此外,串口接口为HL1010烧录程序的接口。
2 硬件设计
2.1 HL1010接口及外围电路
HL1010为蓝牙控制芯片,其特点是:除了具有独立的蓝牙控制核心外,还集成了一颗8051微控制器核心;具有28个独立的GPIO,两路语音输入输出通道;集成了I2C和SPI控制器,便于外围设备的扩展;内部固化了键盘扫描固件,可以通过简单的寄存器读写完成键盘扫描。
利用HL1010的外围电路,其中,GPIO10~GPIO17作为键盘行扫描,GPIO30~GPI-O37作为键盘列扫描;GPIO20~GPIO27为电源管理GPIO,分别通过软件来控制加速度传感器、数字陀螺仪、地磁计、E2PROM、扬声器、振动电机等模块的开关,以达到节能的作用;Pin44、45、48、49、50为语音模块接口,pin23、24为I2C接口。其余引脚为芯片的供电和射频匹配电路。HL1010的外围电路可参考文献[2]。
2.2 传感器模块
表1为本设计中传感器的部分参数,三个传感器都通过I2C总线与主控芯片进行交互,电路设计较为简单。
3 软件设计
3.1 体感算法
体感功能中最常用的是空中鼠标,即通过遥控器在空中的挥舞来控制屏幕中鼠标的运动,同时通过遥控器按键实现鼠标按键的操作,从而使用户能在远距离的三维空间中获得鼠标的操作功能。为了实现空中鼠标的功能,本文采用陀螺仪和加速度传感器。通过对陀螺仪得到的角速度数据分析得出遥控器的运动状态,作为空中鼠标的主要数据;通过对加速度传感器提供的加速度(主要是判断重力加速度的方向)数据进行分析,得到遥控器所处的姿态,从而对陀螺仪的数据进行坐标转换。陀螺仪所得数据中与重力加速度平行的方向为Y轴,与重力加速度垂直的为X轴,使最终空中鼠标的Y轴与重力加速度的平行方向始终一致、X轴与重力加速度的垂直方向始终一致。其数学方法如下[3-4]:
遥控器的加速度为as,大地系加速度为ai,两者的转化关系为:
ai=asRis (1)
其中,Ris为遥控器相对于大地系的余弦阵,其表达式为:
经过坐标转换后,无论使用者如何将遥控器握在手中(正握,反握,竖立,倒立等),空中鼠标的运动仅与使用者手臂的运动方向有关,而与遥控器的运动方向无关。
算法的主要流程为:(1)对角速度进行采样,并进行数字滤波;(2)对加速度进行采样,并进行数字滤波;(3)通过加速度传感器数据对陀螺仪的坐标轴进行旋转;(4)计算鼠标两个轴的偏移量;(5)通过键盘扫描得到鼠标按键键值;(6)通过HID协议将键值发送给服务端。数据流程如图2所示。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






