
资料下载


×
MSP430温度控制系统的设计方案
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-10-26
分享资料个
调温设备如冰箱、冰柜、空调已广泛地走进大众家庭,这些设备带给了人们更多的舒适,人们也越来越依赖它们。为此,我们小组搭建了一个温度自动控制系统,模拟调温设备在日常生活中的运作,深入探讨其工作原理及可优化潜力。
1 系统组成
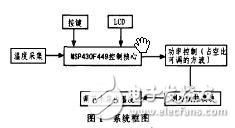
本系统以MSP430系统板为控制核心,包括温度采集、PID算法功率控制、调温、人机交互等模块。其采用数字式温度传感器DS18B20作为温度采样元件,在通用定时器B周期中断的控制下,低功耗单片机MSP430F449通过其通用I/O口从DS18B20读取采样值,再通过PID控制算法计算出控制量去控制主电路的电流方向和PWM波的输出。电流方向决定对控温对象进行加热或制冷,输出的PWM波驱动功率MOSFET IRF540,从而达到控制热电模块加热或制冷的功率的目的,系统组成框图如图1所示。
2 MSP430F449简介
MSP430F449是TI公司推出的16位超低功耗混合信号处理器,同时集成数字和模拟电路。其具有特点:16位CPU通过总线连接到存储器和外围模块;直接嵌入仿真处理,具有JTAG接口;多时钟能够降低功耗,多总线能够降低噪声;16位数据宽度,数据处理更有效。它的集成调试环境Embedded Workbench提供了良好的C语言开发平台。
MSP430F449的定时器A和定时器B都可以实现PWM:当定时器工作在PWM波产生模式,就可以利用寄存器CCR0控制PWM波形的周期,用另外寄存器控制占空比,生成PWM波方便。并且片内集成段式液晶驱动模块,便于显示温度值。
3 PID控制算法原理
3.1 PID控制系统筒介
PID控制系统如图2所示,D(s)完成PID控制规律,称为PID控制器。PID控制器是一种线性控制器,用输出量y(t)和给定量r(t)之间的误差的时间函数e(t)=r(t)-y(t)的比例、积分和微分的线性组合构成控制量u(t),称为比例(Proportional)、积分(Integrating)、微分(Differ-entiation)控制,简称PID控制。
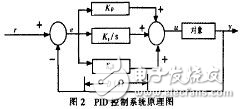
PID控制组合了比例控制、积分控制和微分控制这3种基本控制规律,通过改变调节器参数来实现控制,其基本输入输出关系为:

实际应用中,可以根据受控对象的特性和控制的性能要求,灵活采用比例(P)控制器、比例+积分(PI)控制器、比例+积分+微分(PID)控制器3种不同控制组合。
3.2 PID参数控制效果分析
PID控制的3基本参数为KP、KI、KD,这3项参数的实际控制作用为:
比例碉节参数(KP) 按比例反映系统的偏差。增大KP,系统的反应变灵敏、速度加快、稳态误差减小,但振荡次数也会加多、调节时间加长。在该反馈环中,该值主要影响速度。
积分调节参数(KI) 消除系统静态(稳态)误差,提高系统的控制精度。积分调节会使系统的稳定性下降,动态响应变慢,超调加大。积分控制一般不单独作用,而是与P或者PD结合作用。
微分调节参数(KD) 反映系统偏差信号的变化率,可以预见偏差的变化趋势,产生超前控制作用。因此,微分控制可以提高系统的动态跟踪性能,减小超调量,但对噪声干扰有放大作用。过强的微分调节会使系统剧烈震荡,对抗干扰不利。
常规的PID控制系统中,减少超调和提高控制精度难以两全其美。主要是积分作用有缺陷造成的。如果减少积分作用,静差不易消除,有扰动时,消除误差速度变慢;而加强积分作用时又难以避免超调,这也是常规PID控制中经常遇到的难题。所以在该系统中,对积分参数做了分段处理,已达到理想的效果。
4 温控装置及原理
DS18B20支持“一线总线”接口,测量温度范围为-55~+125℃,测量范围广。DS18B20可以程序设定9~12位的分辨宰,精度为0.0625 ℃,分辨率高。支持3~5.5 V的电压范围。现场温度直接以“一线总线”的数字方式传输,大大提高了系统的抗干扰性。并且只需占用一根微控制器的I/O口,节省I/O口。本系统选用PR-35封装。
控制电路选择VDD供电方式,即VDD接+5 V,GND接地,I/O接单片机I/O。
DS18B20的主要部件:64位激光ROM,温度传感器,非易失性温度报警触发器TH和TL,高度暂存器。
4.1 单线总线访问DS18B20的协议
DS18B20需要严格的协议以确保数据的完整性。协议包括几种单线信号类型:复位脉冲、存在脉冲、写0、写1、读0和读1。所有这些信号,除存在脉冲外,都由总线控制器发出。
4.1.1 初始化
通过单线总线的所有执行都从一个初始化序列(一个由总线控制器发出的复位脉冲和跟在其后由从机发出的存在脉冲)开始。之后存在脉冲让总线控制器知道DS18B20在总线上且已做准备好操作。
4.1.2 ROM操作命令
一旦总线控制器检测到一个存在脉冲,它就可以发出5个ROM命令中的任一个:Read ROM,Match ROM,Skip ROM,Search ROM,Alarm Search。
由于只用到一个DS18B20,所以选择Skip ROM跳过指令,无需进行地址序列号的检查,可以加大软件运行速度。
1 系统组成
本系统以MSP430系统板为控制核心,包括温度采集、PID算法功率控制、调温、人机交互等模块。其采用数字式温度传感器DS18B20作为温度采样元件,在通用定时器B周期中断的控制下,低功耗单片机MSP430F449通过其通用I/O口从DS18B20读取采样值,再通过PID控制算法计算出控制量去控制主电路的电流方向和PWM波的输出。电流方向决定对控温对象进行加热或制冷,输出的PWM波驱动功率MOSFET IRF540,从而达到控制热电模块加热或制冷的功率的目的,系统组成框图如图1所示。
2 MSP430F449简介
MSP430F449是TI公司推出的16位超低功耗混合信号处理器,同时集成数字和模拟电路。其具有特点:16位CPU通过总线连接到存储器和外围模块;直接嵌入仿真处理,具有JTAG接口;多时钟能够降低功耗,多总线能够降低噪声;16位数据宽度,数据处理更有效。它的集成调试环境Embedded Workbench提供了良好的C语言开发平台。
MSP430F449的定时器A和定时器B都可以实现PWM:当定时器工作在PWM波产生模式,就可以利用寄存器CCR0控制PWM波形的周期,用另外寄存器控制占空比,生成PWM波方便。并且片内集成段式液晶驱动模块,便于显示温度值。
3 PID控制算法原理
3.1 PID控制系统筒介
PID控制系统如图2所示,D(s)完成PID控制规律,称为PID控制器。PID控制器是一种线性控制器,用输出量y(t)和给定量r(t)之间的误差的时间函数e(t)=r(t)-y(t)的比例、积分和微分的线性组合构成控制量u(t),称为比例(Proportional)、积分(Integrating)、微分(Differ-entiation)控制,简称PID控制。
PID控制组合了比例控制、积分控制和微分控制这3种基本控制规律,通过改变调节器参数来实现控制,其基本输入输出关系为:
实际应用中,可以根据受控对象的特性和控制的性能要求,灵活采用比例(P)控制器、比例+积分(PI)控制器、比例+积分+微分(PID)控制器3种不同控制组合。
3.2 PID参数控制效果分析
PID控制的3基本参数为KP、KI、KD,这3项参数的实际控制作用为:
比例碉节参数(KP) 按比例反映系统的偏差。增大KP,系统的反应变灵敏、速度加快、稳态误差减小,但振荡次数也会加多、调节时间加长。在该反馈环中,该值主要影响速度。
积分调节参数(KI) 消除系统静态(稳态)误差,提高系统的控制精度。积分调节会使系统的稳定性下降,动态响应变慢,超调加大。积分控制一般不单独作用,而是与P或者PD结合作用。
微分调节参数(KD) 反映系统偏差信号的变化率,可以预见偏差的变化趋势,产生超前控制作用。因此,微分控制可以提高系统的动态跟踪性能,减小超调量,但对噪声干扰有放大作用。过强的微分调节会使系统剧烈震荡,对抗干扰不利。
常规的PID控制系统中,减少超调和提高控制精度难以两全其美。主要是积分作用有缺陷造成的。如果减少积分作用,静差不易消除,有扰动时,消除误差速度变慢;而加强积分作用时又难以避免超调,这也是常规PID控制中经常遇到的难题。所以在该系统中,对积分参数做了分段处理,已达到理想的效果。
4 温控装置及原理
DS18B20支持“一线总线”接口,测量温度范围为-55~+125℃,测量范围广。DS18B20可以程序设定9~12位的分辨宰,精度为0.0625 ℃,分辨率高。支持3~5.5 V的电压范围。现场温度直接以“一线总线”的数字方式传输,大大提高了系统的抗干扰性。并且只需占用一根微控制器的I/O口,节省I/O口。本系统选用PR-35封装。
控制电路选择VDD供电方式,即VDD接+5 V,GND接地,I/O接单片机I/O。
DS18B20的主要部件:64位激光ROM,温度传感器,非易失性温度报警触发器TH和TL,高度暂存器。
4.1 单线总线访问DS18B20的协议
DS18B20需要严格的协议以确保数据的完整性。协议包括几种单线信号类型:复位脉冲、存在脉冲、写0、写1、读0和读1。所有这些信号,除存在脉冲外,都由总线控制器发出。
4.1.1 初始化
通过单线总线的所有执行都从一个初始化序列(一个由总线控制器发出的复位脉冲和跟在其后由从机发出的存在脉冲)开始。之后存在脉冲让总线控制器知道DS18B20在总线上且已做准备好操作。
4.1.2 ROM操作命令
一旦总线控制器检测到一个存在脉冲,它就可以发出5个ROM命令中的任一个:Read ROM,Match ROM,Skip ROM,Search ROM,Alarm Search。
由于只用到一个DS18B20,所以选择Skip ROM跳过指令,无需进行地址序列号的检查,可以加大软件运行速度。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






