
资料下载


×
DSP无刷电动机控制系统设计解析
消耗积分:1 |
格式:rar |
大小:0.5 MB |
2017-10-31
分享资料个
众所周知,直流电动机调速性能好,但存在机械换向装置易造成换向火花、电磁干扰及需要定期维护等不足;同步电动机效率高,功率因数可调,但存在启动困难,重载时易振荡失步等问题。
随着电力电子技术、计算机技术和新型永磁材料的不断发展,为提出一种利用电子换向原理实现永磁无刷电动机控制创造了条件。特别是近几年推出的数字信号处理器(DSP)芯片,解决了原来微处理器结构复杂,单片微处理速度达不到实时系统控制的要求,为无刷电动机的复杂算法提供了软硬件基础。
1 系统结构和工作原理
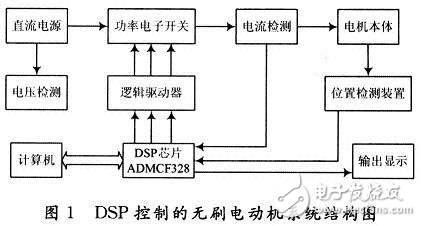
无刷电动机属于一种自控同步电动机,它主要由DSP电机专用高速处理器芯片、转子位置传感器、逻辑驱动电路、功率电子开关、电流和电压检测等装置组成。DSP控制的无刷电动机系统结构如图1所示。其中,无刷电动机定子绕组为星形接法;DSP控制芯片ADMCF328驱动专用集成芯片IR2130;逆变桥采用三相桥式电路;转子位置检测器利用霍尔元件检测,并利用位置信号估算转子的转速,以实现转速闭环控制。
无刷电动机的转子采用永磁体,产生直轴位置的励磁磁场,定子为电枢绕组,通过功率控制器控制各相绕组的通断状态而产生旋转磁场。设计无刷电动机控制系统设计的关键是如果选择转子位置检测器,当电动机定子电枢系统直接由转子转速控制。当电动机速度降低时,位置检测器的输出信号频率也降低,电枢电流频率及其旋转磁场的速度也随之降低,但若使电枢磁场与励磁磁场的相对位置仍保持不变,则电动机就不会失步。同时,由无刷电动机调速特性可知,调节直流电压Ud的大小,可以改变电动机的转速性能,这与有刷直流电动机有相似的机械特性。
2 控制系统硬件设计
2.1 控制系统设计
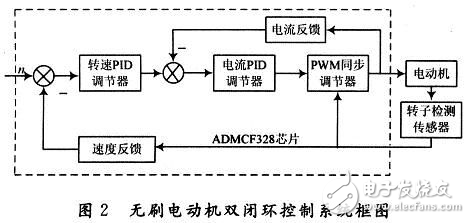
电动机控制系统采用速度外环和电流内环的双闭环控制,两个反馈环节的调节器都采用PID数字调节器,如图2所示。计算电动机转子转速的目的是为了实现转速调节和计算出电枢电流的指令值。在直流母线上采集电流调节器的采样信号,采样信号与前端值比较计算后输出给PWM同步调节器。电流调节器、速度调节器的计算除了调节器设定的PID参数KP,kI和kD外,还要设定PWM周期参数等。
2.2 DSP控制板
DSP控制板由ADI公司生产的专用DSP芯片ADMCF328、硬件控制与恢复电路等组成。ADM-CF、328芯片具有强大、快速的处理能力,主要完成控制算法的处理、PWM输出、模/数转换、与上位机通信和输出显示等功能。
该芯片只有28个外部引脚,缩小了控制板尺寸,提高了系统的可靠性,而且具有价格低等优点。芯片的内部集成了一个具有反向功能的5倍放大器,用于精确的电流采样,实现电流的闭环控制。芯片与IR2130驱动电路、转子位置检测器、键盘和计算机等外设备连接,可实现无刷电动机的实时控制和运行监视。
2.3 转子位置检测器
转子位置检测器是无刷电动机的重要组成部分,常用的转子位置检测器有电磁感应式、光电式、霍尔开关式和接近开关式。高性能的无刷电机位置检测器、磁电码盘和旋转变压器式,可根据实际控制系统的要求予以选择。
该系统选用霍尔开关式转子位置检测器,具有性价比高的特点。它的工作原理是:在霍尔元件的输入端通入控制电流,当霍尔元件受到外磁场作用时,输出端便有了信号输出,根据霍尔元件的控制信号便可判断转子磁极的位置。同时利用定时器确定相邻两次霍尔位置状态变化所需的时间,就可以估算出转子的实际转数和转向。
3 控制系统软件设计
控制系统软件设计与上述硬件电路密切相关。软件程序设计主要包括主程序和中断服务子程序。主程序主要完成ADFVCF328的初始化、变量与常量参数的设置等。主程序实际上是进入一个查询过程,程序不断查询电压状态、电流状态,更新标志并调入换相服务子程序,给电动机相应的定子绕组通电。中断服务子程序主要完成ADC转换,测量电机定子电流、直流电压、PID数字比较运算,确定PWM占空比、PMW周期中断,计算及更新PWM寄存器的值。软件程序设计还要考虑转子位置传感器、霍尔元件信号接口的初始化及功能设计、PID数字反馈系统的参数设定等。
随着电力电子技术、计算机技术和新型永磁材料的不断发展,为提出一种利用电子换向原理实现永磁无刷电动机控制创造了条件。特别是近几年推出的数字信号处理器(DSP)芯片,解决了原来微处理器结构复杂,单片微处理速度达不到实时系统控制的要求,为无刷电动机的复杂算法提供了软硬件基础。
1 系统结构和工作原理
无刷电动机属于一种自控同步电动机,它主要由DSP电机专用高速处理器芯片、转子位置传感器、逻辑驱动电路、功率电子开关、电流和电压检测等装置组成。DSP控制的无刷电动机系统结构如图1所示。其中,无刷电动机定子绕组为星形接法;DSP控制芯片ADMCF328驱动专用集成芯片IR2130;逆变桥采用三相桥式电路;转子位置检测器利用霍尔元件检测,并利用位置信号估算转子的转速,以实现转速闭环控制。
无刷电动机的转子采用永磁体,产生直轴位置的励磁磁场,定子为电枢绕组,通过功率控制器控制各相绕组的通断状态而产生旋转磁场。设计无刷电动机控制系统设计的关键是如果选择转子位置检测器,当电动机定子电枢系统直接由转子转速控制。当电动机速度降低时,位置检测器的输出信号频率也降低,电枢电流频率及其旋转磁场的速度也随之降低,但若使电枢磁场与励磁磁场的相对位置仍保持不变,则电动机就不会失步。同时,由无刷电动机调速特性可知,调节直流电压Ud的大小,可以改变电动机的转速性能,这与有刷直流电动机有相似的机械特性。
2 控制系统硬件设计
2.1 控制系统设计
电动机控制系统采用速度外环和电流内环的双闭环控制,两个反馈环节的调节器都采用PID数字调节器,如图2所示。计算电动机转子转速的目的是为了实现转速调节和计算出电枢电流的指令值。在直流母线上采集电流调节器的采样信号,采样信号与前端值比较计算后输出给PWM同步调节器。电流调节器、速度调节器的计算除了调节器设定的PID参数KP,kI和kD外,还要设定PWM周期参数等。
2.2 DSP控制板
DSP控制板由ADI公司生产的专用DSP芯片ADMCF328、硬件控制与恢复电路等组成。ADM-CF、328芯片具有强大、快速的处理能力,主要完成控制算法的处理、PWM输出、模/数转换、与上位机通信和输出显示等功能。
该芯片只有28个外部引脚,缩小了控制板尺寸,提高了系统的可靠性,而且具有价格低等优点。芯片的内部集成了一个具有反向功能的5倍放大器,用于精确的电流采样,实现电流的闭环控制。芯片与IR2130驱动电路、转子位置检测器、键盘和计算机等外设备连接,可实现无刷电动机的实时控制和运行监视。
2.3 转子位置检测器
转子位置检测器是无刷电动机的重要组成部分,常用的转子位置检测器有电磁感应式、光电式、霍尔开关式和接近开关式。高性能的无刷电机位置检测器、磁电码盘和旋转变压器式,可根据实际控制系统的要求予以选择。
该系统选用霍尔开关式转子位置检测器,具有性价比高的特点。它的工作原理是:在霍尔元件的输入端通入控制电流,当霍尔元件受到外磁场作用时,输出端便有了信号输出,根据霍尔元件的控制信号便可判断转子磁极的位置。同时利用定时器确定相邻两次霍尔位置状态变化所需的时间,就可以估算出转子的实际转数和转向。
3 控制系统软件设计
控制系统软件设计与上述硬件电路密切相关。软件程序设计主要包括主程序和中断服务子程序。主程序主要完成ADFVCF328的初始化、变量与常量参数的设置等。主程序实际上是进入一个查询过程,程序不断查询电压状态、电流状态,更新标志并调入换相服务子程序,给电动机相应的定子绕组通电。中断服务子程序主要完成ADC转换,测量电机定子电流、直流电压、PID数字比较运算,确定PWM占空比、PMW周期中断,计算及更新PWM寄存器的值。软件程序设计还要考虑转子位置传感器、霍尔元件信号接口的初始化及功能设计、PID数字反馈系统的参数设定等。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





