
资料下载


火星探测器基于机器视觉的坡度估计
分享资料个
随着我国深空探测技术的不断发展,火星探测成为我国既月球探测后的下一个目标。与月球相比,火星距离远与地面站进行实时联系较困难,所以要求火星探测器具有较强的自主着陆能力。众多深空探测研究表明,探测器着陆区域的坡度一般为15度,最大着陆坡度不能超过30度。探测器要实现白主安全着陆,必须避开障碍物着陆到较为平坦的区域。因此实现火星探测器拟着陆区域的坡度估计显得尤为重要。火星距地球远,负载能力有限,选择传感器要考虑到火星探测这一特殊情况。光学摄像机与其它传感器相比,重量轻、能耗小适合火星探测这种远程探测器。并且光学摄像机产生的图像信息成本低、图像的信息量大非常适合火星探测实时坡度估计。因此。基于被动图像的火星探测器自主着陆研究有着较为重要的意义。
Larry Matthies在2008年提出用立体视觉对坡度进行检测:北京航空航天大学的马莲等提出了利用高程数据进行坡度估计:哈尔滨T业大学的田阳,崔平远,崔祜涛等利用非线性迭代来着陆区域的单应矩阵得到法线方向从而得到坡度。
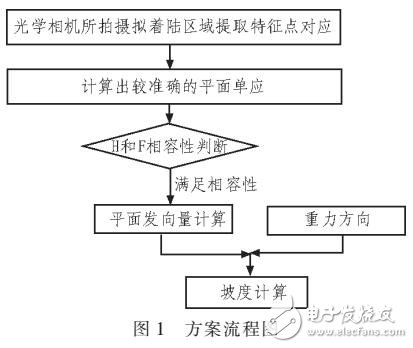
文中根据舒勒定理得出火星重力方向,然后根据计算机视觉中平面单应矩阵H与其基础矩阵F具有相容性原理得到所拍摄平面酌法向量,则坡度大小为平面法向量与重力方向夹角的大小。该方案经过仿真验证,能够满足火星探测器自主着陆过程中对坡度估计的要求。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






