
资料下载


×
精度位置控制应用中NanoPWM驱动器代替线性驱动器的解析
消耗积分:1 |
格式:rar |
大小:0.5 MB |
2017-11-16
分享资料个
ACS Motion Control
介绍
许多工业应用, 半导体晶圆检测测系统, 有机发光二极管平板显示器生产和检测,,这些应用要求极其高的运动性能,在低速匀速运动的纳米级运动中保持亚纳米级的静止抖动和跟随误差。目前线性伺服驱动已经被应用于满足这些需求。这种类型的驱动器提供了惊人的性能,可以达到这些应用需要的线性度。但是由于线性伺服驱动器效率低,热损耗大,体积大、笨重。新一代450mm半导体比目前的300mm半导体大得多,而且这样的系统需要驱动器具有更高的能力,更高的电压和电流。这就要求线性驱动器体积非常大,而且能量很有限,因此限制了这个系统的性能和生产量,增加了系统成本,降低了系统可靠性。
NanoPWM是开关PWM驱动器的线性化,这种线性化基于一种独特的专利技术。
在过去5年中ACS研发的PWMBoost可以满足这样的位置系统。NanoPWM驱动器提供更好的位置性能和跟随性能,并且克服了线性驱动器的缺点。NanoPWM非常紧凑,有更高的效率和可靠性,可以提供更高的能量,电流和电源,而且更经济。
伺服驱动器的种类
两种主要的伺服驱动器:线性驱动器和开关PWM驱动器。
图1描绘了线性驱动器的原理框图。这个驱动器像一个可变电阻一样工作,根据电流需求和负载阻抗调节电流。供电电压被分配在马达和驱动器之前。当马达以低速运行被要求提供大力矩时,电流就是高的,加在马达上的电压就是低的,加在驱动器上的电压就是高的。此时驱动器的损耗是很高的。
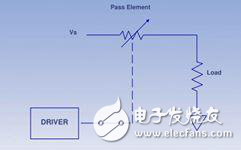
图1线性驱动器的原理图描述
图2描述了开关PWM驱动的原理图框图。驱动器作为通断开关工作。马达作为平均电流的综合集成。平均电流是开关占空比的线性函数。任意给定时刻开关或者是断开的(没有电流流过开关)或者是导通的(有低电压加在开关上)。因此开关损耗是很低的。
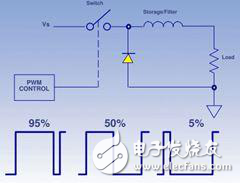
图2—PWM驱动器的原理图描述
介绍
许多工业应用, 半导体晶圆检测测系统, 有机发光二极管平板显示器生产和检测,,这些应用要求极其高的运动性能,在低速匀速运动的纳米级运动中保持亚纳米级的静止抖动和跟随误差。目前线性伺服驱动已经被应用于满足这些需求。这种类型的驱动器提供了惊人的性能,可以达到这些应用需要的线性度。但是由于线性伺服驱动器效率低,热损耗大,体积大、笨重。新一代450mm半导体比目前的300mm半导体大得多,而且这样的系统需要驱动器具有更高的能力,更高的电压和电流。这就要求线性驱动器体积非常大,而且能量很有限,因此限制了这个系统的性能和生产量,增加了系统成本,降低了系统可靠性。
NanoPWM是开关PWM驱动器的线性化,这种线性化基于一种独特的专利技术。
在过去5年中ACS研发的PWMBoost可以满足这样的位置系统。NanoPWM驱动器提供更好的位置性能和跟随性能,并且克服了线性驱动器的缺点。NanoPWM非常紧凑,有更高的效率和可靠性,可以提供更高的能量,电流和电源,而且更经济。
伺服驱动器的种类
两种主要的伺服驱动器:线性驱动器和开关PWM驱动器。
图1描绘了线性驱动器的原理框图。这个驱动器像一个可变电阻一样工作,根据电流需求和负载阻抗调节电流。供电电压被分配在马达和驱动器之前。当马达以低速运行被要求提供大力矩时,电流就是高的,加在马达上的电压就是低的,加在驱动器上的电压就是高的。此时驱动器的损耗是很高的。
图1线性驱动器的原理图描述
图2描述了开关PWM驱动的原理图框图。驱动器作为通断开关工作。马达作为平均电流的综合集成。平均电流是开关占空比的线性函数。任意给定时刻开关或者是断开的(没有电流流过开关)或者是导通的(有低电压加在开关上)。因此开关损耗是很低的。
图2—PWM驱动器的原理图描述
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 赵三默
2020-09-11
0 回复 举报是我需要的文档 收起回复
赵三默
2020-09-11
0 回复 举报是我需要的文档 收起回复
- 相关下载
- 相关文章







