
资料下载


×
为什么大疆无人机做的好?
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-11-22
分享资料个
无人机的飞行感知技术主要用作两个用途,其一是提供给飞行控制系统,由于飞行控制系统的主要功能是控制飞机达到期望姿态和空间位置,所以这部分的感知技术主要测量飞机运动状态相关的物理量,涉及的模块包括陀螺仪、加速度计、磁罗盘、气压计、GNSS模块以及光流模块等。另一个用途是提供给无人机的自主导航系统,也就是路径和避障规划系统,所以需要感知周围环境状态,比如障碍物的位置,相关的模块包括测距模块以及物体检测、追踪模块等。
陀螺仪
目前商用无人机普遍使用的是MEMS技术的陀螺仪,因为它的体积小,价格便宜,可以封装为IC的形式。MEMS式陀螺仪常用来测量机体绕自身轴旋转的角速率,常用的型号有6050A(Invensense),ADXRS290(ADI),衡量陀螺仪性能的指标包括测量范围(量程)、灵敏度、稳定性(漂移)以及信噪比等。
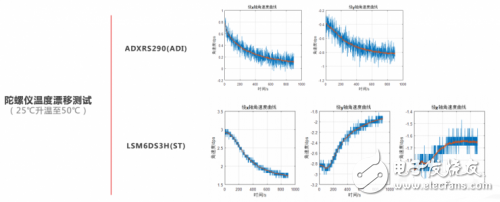
上面是一个陀螺仪温度漂移测试结果图,测试的环境是从25℃升温至50℃,整个过程保持陀螺仪静止不动,陀螺仪的准确输出应该是一个固定的数值。但从结果来看,两款传感器的实际输出都受到温度变化影响。相比而言,ADXRS290(ADI)的输出数值变化幅度较小,基本上在0.5左右。
加速度计
加速度计测量的是机体运动的线加速度,但由于地球引力,测量值中还会包含重力加速度分量,在某些使用情况下需要把这部分减去。常用的MEMS加速度计传感器型号有6050A(Invensense)和ADXL350(ADI)。部分传感器生产商为了提高芯片集成度,会将陀螺仪和加速度计封装在一起,称为六轴传感器,例如6050A(Invensense)。
磁罗盘
磁罗盘测量的物理量是地球磁场强度沿机体轴的分量,并依此计算出机体的航向角。常用的MEMS磁罗盘传感器型号有HMC5983L(Honeywell)和QMC5883L(矽睿),两者性能相近,其中前者目前已经停产。磁罗盘主要的性能参数包括灵敏度、稳定性(漂移)等。
气压计
气压计测量的物理量是大气压值,根据该数值可计算出绝对海拔高度。常用的气压计传感器型号包括MS5611(MEAS)、MS5607(MEAS)以及BMP180(Bosch)。气压计在使用过程中存在的问题是,在近地面飞行时,“地面效应”的存在会导致飞机周围气体的气压分布与静止状态下的大气不同,使得无法用气压计来测算出高度。通常的解决办法是在起飞或降落时使用其他传感器,比如超声波传感器或激光测距仪。
陀螺仪
目前商用无人机普遍使用的是MEMS技术的陀螺仪,因为它的体积小,价格便宜,可以封装为IC的形式。MEMS式陀螺仪常用来测量机体绕自身轴旋转的角速率,常用的型号有6050A(Invensense),ADXRS290(ADI),衡量陀螺仪性能的指标包括测量范围(量程)、灵敏度、稳定性(漂移)以及信噪比等。
上面是一个陀螺仪温度漂移测试结果图,测试的环境是从25℃升温至50℃,整个过程保持陀螺仪静止不动,陀螺仪的准确输出应该是一个固定的数值。但从结果来看,两款传感器的实际输出都受到温度变化影响。相比而言,ADXRS290(ADI)的输出数值变化幅度较小,基本上在0.5左右。
加速度计
加速度计测量的是机体运动的线加速度,但由于地球引力,测量值中还会包含重力加速度分量,在某些使用情况下需要把这部分减去。常用的MEMS加速度计传感器型号有6050A(Invensense)和ADXL350(ADI)。部分传感器生产商为了提高芯片集成度,会将陀螺仪和加速度计封装在一起,称为六轴传感器,例如6050A(Invensense)。
磁罗盘
磁罗盘测量的物理量是地球磁场强度沿机体轴的分量,并依此计算出机体的航向角。常用的MEMS磁罗盘传感器型号有HMC5983L(Honeywell)和QMC5883L(矽睿),两者性能相近,其中前者目前已经停产。磁罗盘主要的性能参数包括灵敏度、稳定性(漂移)等。
气压计
气压计测量的物理量是大气压值,根据该数值可计算出绝对海拔高度。常用的气压计传感器型号包括MS5611(MEAS)、MS5607(MEAS)以及BMP180(Bosch)。气压计在使用过程中存在的问题是,在近地面飞行时,“地面效应”的存在会导致飞机周围气体的气压分布与静止状态下的大气不同,使得无法用气压计来测算出高度。通常的解决办法是在起飞或降落时使用其他传感器,比如超声波传感器或激光测距仪。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





