
资料下载


×
正确判断无人机指向故障 让电子罗盘远离磁干扰
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-12-10
分享资料个
目前,爱盛科技旗下3×3mm LGA封装的地磁传感器IST8310,在无人机市场的市占率超过80%,市场上能够看到的大厂的无人机产品,都采用了爱盛科技的地磁传感器,是现今主流无人机使用地磁传感器的标杆产品,因此下文提及的无人机测试样本,也均为这一型号。众所周知,磁场和距离的多次方成反比,而无人机内部电子罗盘和其余电子元器件距离较近,因此内部系统排布的不合理会导致电子罗盘受到磁场干扰,而这一情况又往往被设计者忽略。为了避免在实际飞行时因电子罗盘故障而出现坠机情况,在无人机完成硬件打样或试作后,无需进行实际飞行,通过测试即可完成对电子罗盘的准确分析。在前期测试中,先用木材、塑料、泡棉、铝材没有磁场的材料将无人机固定,值得注意的是,无人机最好安装外壳和旋翼,这能够最大程度去模拟真实飞行时的情况。考虑到无人机马达和电路可能为磁场干扰源,因此我们需要从I2C接口导出“X轴磁场大小、Y轴磁场大小、Z轴磁场大小、油门大小”这几项数据加以储存并相互对比,作为后续分析的重要依据。
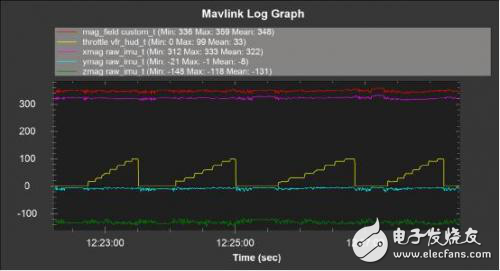
图1:无人机内部系统设计合理 油门开启时磁场感应规律且稳定
测试过程中,只需将油门从关闭调整到开启状态并逐级推进,进行几轮反复测试,最终将几轮测试的数据汇总到同一时间轴上进行展现。由于无人机已经被固定住,并没有出现方位的移动,因此理论上无论油门如何调整,X、Y、Z各轴磁场的数字应变化不大,呈现出区域平稳的态势。但实际上,由于电子罗盘组件本身及系统都会有噪声,因此数据线条会有一定程度的上下抖动,但趋势应是不变的,抖动的幅度越小,意味着移动路线越稳定。同理,在油门开启或关闭时,实际也会产生一个突波影响电路,磁场同样会产生波动,数据线条抖动越小,也代表电子罗盘放置的位置比较好,系统的整体设计比较合理。如图1所示,一个内部系统设计正确的无人机,在测试中经历了四次油门变化,从零加速到100%,但是指向角度、X轴、Y轴、Z轴磁场都没有强烈波动,只有在油门开启或关闭时,数据会有些许的波动。说明在运作时电子罗盘不会受到系统内的磁场干扰影响,无人机将有较好的操控性能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





