
资料下载


×
基于肌电信号的抓握模式和抓取力的方法
消耗积分:1 |
格式:rar |
大小:0.56 MB |
2018-01-08
分享资料个
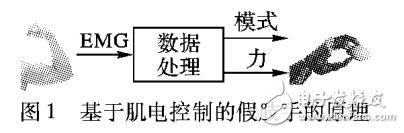
针对大多肌电控制的假肢只研究模式识别而没有对抓握力和抓握模式同步解码的问题,提出一种同时分析抓握模式和抓取力的方法。首先,采用4通道表面电极采集人体手臂肌电信号( EMG),采用力敏电阻(FSR)采集抓取力信号;然后,分别利用线性判别分析( LDA)方法和人工神经网络(ANN)进行抓握模式识别和力估计。在4种抓握模式下分别建立4个肌电信号一力关系,一旦判别出抓取模式,则调用相应模式下肌电信号一力模型估计抓握力大小以实现模式识别和力估计的结合。实验结果表明,当进行模式和力的同步解码时,模式平均分类精度约为77. 8%,力估计的准确率约为90%。该方法可以用于假肢的肌电控制,不仅可以解码使用者的抓取动作的意图,还可以解码使用者期望的抓取力,辅助假肢实现稳定抓取。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






