
资料下载


×
一套车道线检测系统
消耗积分:3 |
格式:rar |
大小:1.29 MB |
2018-01-31
分享资料个
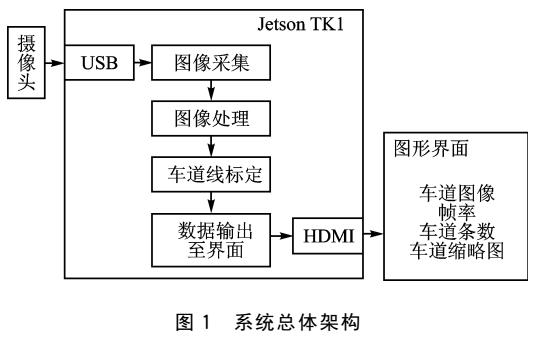
车道线检测主要用于驾驶辅助和无人驾驶系统,根据摄像头数量,分为单目和双目两种检测系统。出于实时性和经济性的考虑,一般采用单目检测,在对采集过来的图像预处理之后进行边缘检测和霍夫变化,提取出图像中的直线,并由各类拟合算法拟合出车道线。通常在车道线检测中,不同光照条件下,对于传统固定值的车道检测算法有非常大的影响,经常出现长时间无法检测到车道线的情况。本文通过灰度世界算法对图像进行白平衡处理,能很好过滤掉摄像头采集过来的图像的光照噪声。对于车道线检测的感兴趣区域(ROI),一般在图像的下半部分,即车道消失的点到图像底部。传统车道线检测对ROI的提取,通常为图像的某一固定区域,由于行驶过程中,车道消失点是不断变化的,所以本文通过灰度世界算法得到的灰度平均值结合灰度分布统计,提取出感兴趣区域,并应用到之后的Canny算法阈值的确定,达到自适应的车道线检测。根据改进的车道线检测算法,基于Nvidia Jetson TKI嵌入式平台结合Qt Quick实现实时车道线检测系统。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 橡皮人
2018-05-05
0 回复 举报很好,再仔细想一下,谢谢共享。 收起回复
橡皮人
2018-05-05
0 回复 举报很好,再仔细想一下,谢谢共享。 收起回复
- 相关下载
- 相关文章







