
资料下载


原理图下载 高性价比无人机载合成孔径雷达系统
工程师
分享资料个
系统成本构成包括:无人机约200欧元,两片雷达电路板600欧元。
该合成孔径雷达无人机系统成像距离至少可达1.5公里,若提升飞行高度探测范围可进一步扩展。整套系统(含雷达、无人机及电池)总重不足1千克,具备HH、HV、VH、VV全极化测量能力。基于梯度最小熵的自聚焦算法配合非RTK级GPS与惯性测量单元(IMU)传感器数据,即可利用宽波束天线获取高质量成像。
这里我们把设计原理简单概述一下:
雷达设计
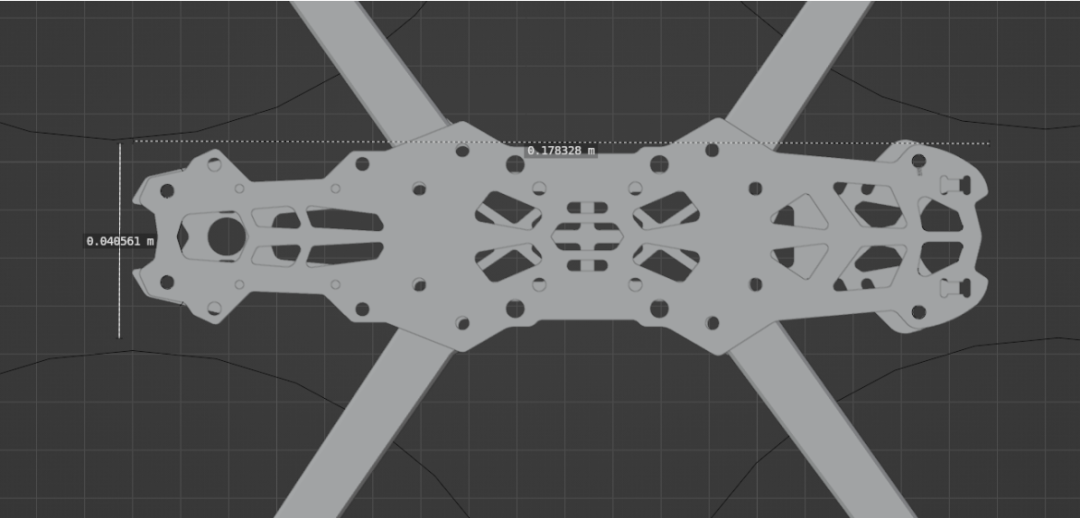
无人机框架尺寸
本项目的核心设计目标在于实现无人机载微型合成孔径雷达系统的最优成像性能,同时满足三大技术约束:微型化适配(可集成于7英寸FPV无人机)、低成本控制(预算<500欧元)以及材料受限(强制使用FR4基板)。预算限制排除了低损耗射频材料的应用可能,电子系统与天线均需采用常规FR4基板实现。
无人机尺寸较小制约了雷达设计:框架宽度仅40mm,螺旋桨间距50mm,虽长度方向留有170mm余量,但宽度限制使雷达须呈狭长形态。以树莓派(56×85mm)为例,其尺寸已超出横向空间限制。这种微型化要求对硬件集成构成严峻挑战。
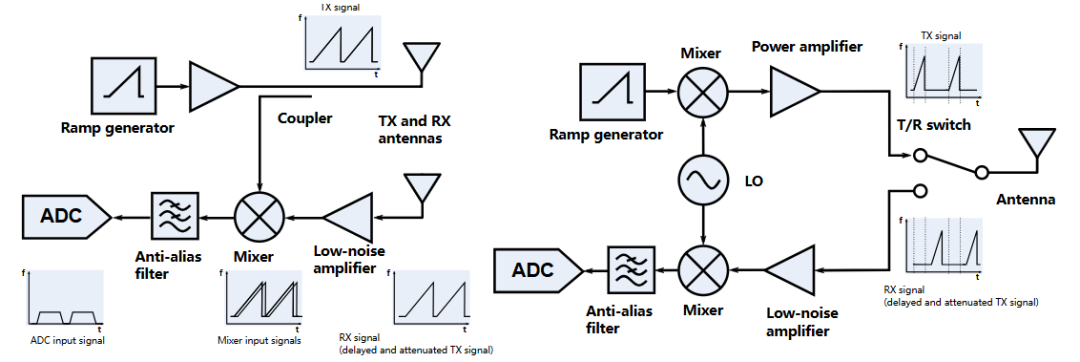
FMCW(左)与脉冲雷达(右)架构框图对比示意图
在既有技术积累基础上,主要考虑两种架构方案:
1. 脉冲雷达方案:
既往研制的64×132mm脉冲雷达虽宽度稍大但具备优化空间
受限于ADC采样率(100MHz带宽),对应1.5m距离分辨率难以满足精细成像需求
扩展ADC带宽将显著增加成本与布局难度
改良型双斜坡发生器设计可生成低频中频信号,规避高速ADC需求(SAR雷达常用方案)
脉冲雷达固有缺陷:
受限于时分离收发机制,最大脉宽受目标往返时延约束(100m最小作用距离对应670ns脉宽限制)
平均发射功率受限导致信噪比下降
超短脉冲序列增加成像算法复杂度
需配置独立收发天线(占用更多空间)
2. FMCW雷达方案:
支持全双工收发,显著提升信噪比
扫频时长仅受合成孔径采样速率约束(可达数百微秒级)
需确保回波信号与发射扫频信号的时域重叠
单次扫频可捕获更多回波能量,有利于提升信号质量
FMCW雷达优势:
在近距离(<数公里)、低速平台场景下性能优势显著
狭长空间可并置微型收发天线
成本效益比优于脉冲方案
综合评估表明,在微型化、低成本约束下,FMCW架构更适配本项目需求。其连续波特性可突破脉冲雷达的时域限制,在有限空间内实现更优的成像性能与系统集成度。
RF 设计
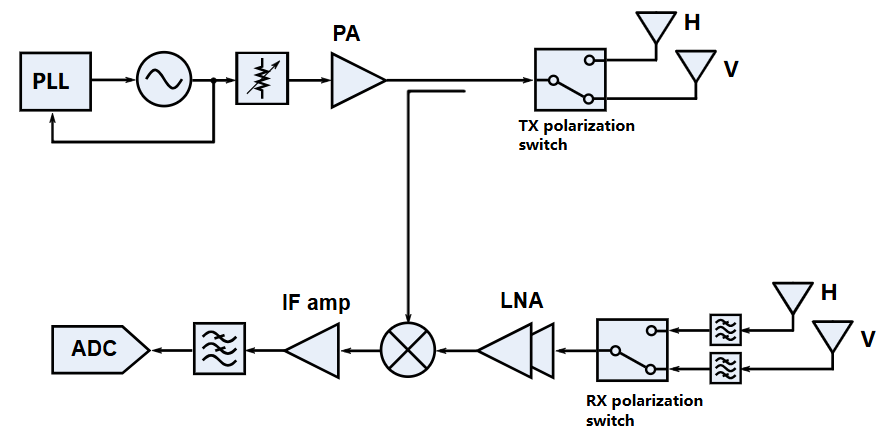
FMCW 雷达架构
上图展示了采用双极化天线的FMCW雷达射频模块框图。扫频信号由锁相环(PLL)生成,经可变衰减器调节后由功率放大器(PA)放大。大部分信号传输至发射天线,通过极化切换开关选择垂直(V)或水平(H)极化模式。部分发射信号耦合至接收混频器,与经低噪声放大器(LNA)放大的反射信号进行混频。接收端同样配置极化切换开关,结合发射端开关可实现HH/HV/VH/VV四种极化组合的收发模式。混频器输出的低频信号经放大后由模数转换器(ADC)数字化,接收链路需配置滤波器以抑制带外干扰并避免ADC混叠效应。
基于DAC或直接数字频率合成器(DDS)的扫频方案在相位噪声和频率切换速度上优于PLL,但PLL因成本低、占板面积小而被采用。
射频频率选择在大约6 GHz左右,这是因为在该频率下有大量价格低廉的消费级射频元件可供选择。在这个频率下,最高输出功率的廉价功率放大器可以输出大约30 dBm的功率。同时,接收端的低噪声放大器也可以以较低的价格获得1 - 2 dB的噪声系数。
接收机采用直接转换架构,混频器没有镜像抑制功能。这导致传输信号频率上下两侧的频率都会被转换为相同的输出频率。这并不是理想的情况,因为接收带外的噪声会增加接收机的噪声底,使其提高3 dB。如果采用IQ采样接收机,可以抑制另一个边带,但这需要两个混频器和ADC。考虑到仅能提高3 dB的信噪比,并不值得增加成本和PCB空间。
极化切换允许选择用于发射和接收的极化方式。H代表水平极化,V代表垂直极化。通过这种方式,可以测量四种极化方式:HH(水平发射水平接收)、HV(水平发射垂直接收)、VH(垂直发射水平接收)和VV(垂直发射垂直接收)。不同的目标对不同极化的反射能力不同,这在遥感中被用来确定反射目标的特性。例如,许多平滑的目标通常反射与其自身极化相同的信号,目标的形状决定了它反射更多HH还是VV分量。森林和植被通常比道路和裸地有更高的交叉极化(HV和VH)反射分量,这是由于植被内部的多次反射造成的。
尽管在框图中H和V天线是分开绘制的,但这并不意味着系统需要四个天线。实际上,可以设计一个具有两个端口的天线,一个端口发射H极化信号,另一个端口发射V极化信号。双极化天线并不一定比单极化天线占用更多的空间。
配置双接收机可同步接收H/V极化信号,优势包括:消除接收端极化开关损耗、延长单次测量时间(提升信噪比)、加速扫频周期(无需切换接收极化)。但综合考虑成本效益,此方案暂未采用。
PCB部分
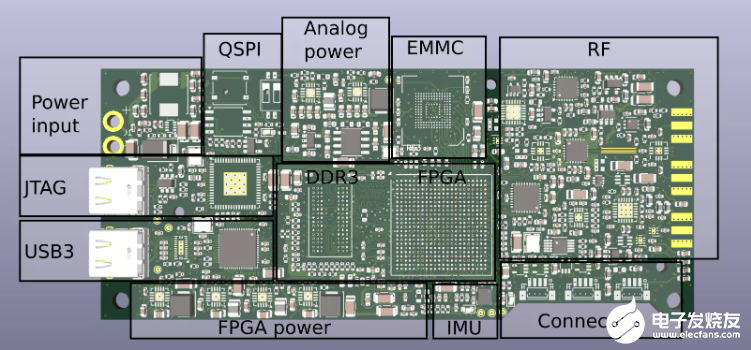
KiCad 中的3D模型
PCB 有六层,通过高密度元件布局实现空间最小化。由于单面组装比双面组装成本低,除底部需手动焊接的SD卡接口外,其余元件均集中布置于顶层。
与我以前的许多雷达一样,射频部分在 PCB 和整个设计工作中占的空间相对较小。数字器件和稳压器占据了 PCB 的大部分空间。
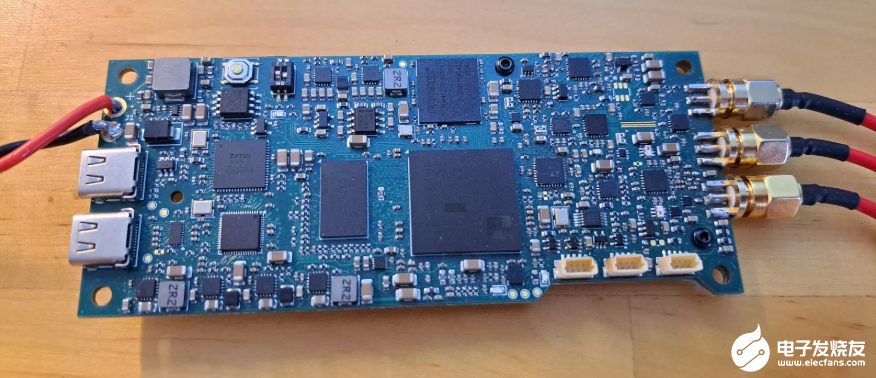
组装完的 PCB
本雷达采用宽压输入设计,直接兼容无人机电池供电系统,支持12-30V直流输入范围。通过优化电源拓扑结构,省去外置DC/TC稳压模块,显著提升系统集成度与能效表现。
由于空间有限,没有足够的空间安装四个 SMA 连接器,我也不想使用任何微型射频连接器。最上面的两个连接器是用于 H 极化和 V 极化天线输入的可切换 TX 输出,最下面的第三个连接器是 RX 输入。RX 极化开关位于外部 PCB 上,与 PCB 板右下方的三个四针 JST 连接器之一相连。另一个 JST 连接器用于连接飞行控制器的串行端口,第三个连接器目前未使用,但可用于连接 GPS 等设备。
还有两个 USB-C 连接器:一个用于 JTAG 编程和调试 FPGA,另一个连接 USB3 到 FIFO 桥接芯片,可将数据快速传输到 PC。无人机使用时不需要它,但在测试和其他应用中很有用。
PCB 尺寸为 113 x 48 毫米。宽度刚好可以装在无人机上,而长度则可以稍长一些。
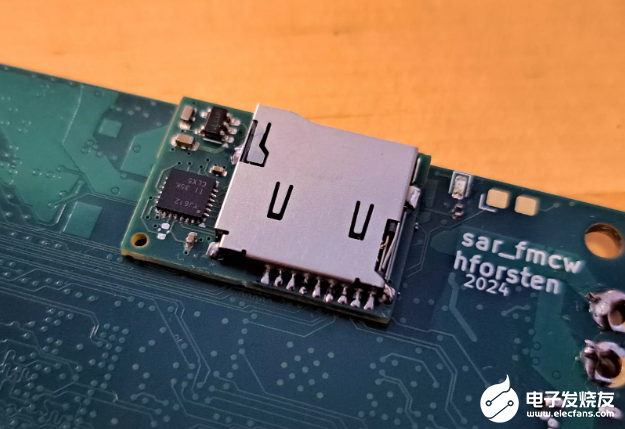 SD 卡插接 PCB
SD 卡插接 PCB
我确实犯了一个错误: 把 SD 卡的引脚误连接到 1.8 V I/O 端口,而它们应该连接到 3.3 V I/O,SD 卡在这种较低电压下无法工作。雷达可以不使用 SD 卡,而是将数据存储到 EMMC 中,然后通过 USB 读取数据,但使用 SD 卡要方便得多。我真的不想再订购一块 PCB 来弥补这个错误,于是我设计了一块带有电平转换器的小型插接 PCB,焊接在之前的 SD 卡封装上,从而弥补了这个错误。
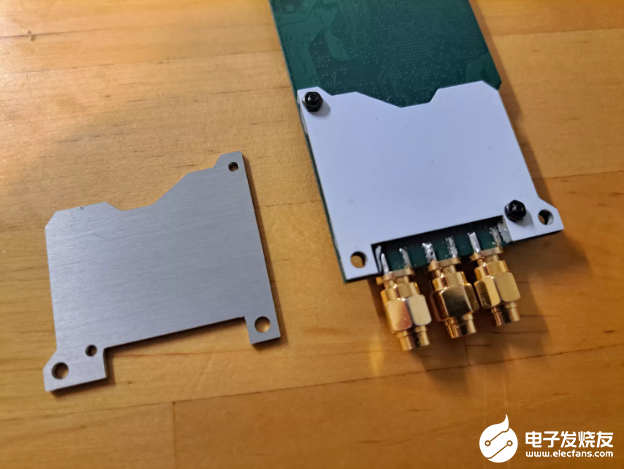
雷达 PCB 下的铝制 PCB 散热器
如果发射占空比较高,功率放大器会变得很热。为了保持低温,我订购了定制的铝基板 PCB,用螺栓固定在雷达 PCB 板下面。在功率放大器下面去掉阻焊层,在 PCB 和散热片之间放置隔热垫。5 块电路板只花了 4 美元,而且效果很好。
更详细的方案欢迎大家移步到详情页:
https://www.elecfans.com/d/6464726.html
无人机载合成孔径雷达系统研制的设计原理
https://www.elecfans.com/d/6466347.html
电子设计及天线部分
https://www.elecfans.com/d/6467774.html
无人机载合成孔径雷达系统的结构设计与图像生成
https://www.elecfans.com/d/6468688.html
实测效果分享
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
-
 abb56789
05-07
0 回复 举报不错,值得学习 收起回复
abb56789
05-07
0 回复 举报不错,值得学习 收起回复
- 相关下载
- 相关文章




