
资料下载


×
MSP430电动车控制系统的设计详析
消耗积分:0 |
格式:rar |
大小:0.22 MB |
2018-04-25
分享资料个
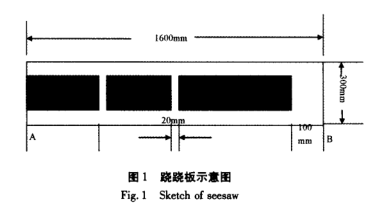
该系统基于M SP430F149 单片机为电动车的控制核心。整个电动车智能控制系统包括:主控制模块、电机驱动模块 、方 向控制与速度检 测模块 ,水平检测传 感 器模 块四 大部 分。其控 制过程是通 过对各种 传感 器采 集的数据进行处理和判断,实现电动车在跷跷板上不同路段的行驶方向和速度的实时控制以及在相应的位置达到动态平衡,同时用LCD 对各指定路段行驶的时间进行实时显示,采用 PW M 与霍尔传感器实现 了对电动车 自动往返速度的精密控制。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





