
资料下载


×
翘翘板智能车设计的详细资料合集(资料,程序,电路图)等详细资料概述
消耗积分:0 |
格式:rar |
大小:6.02 MB |
2018-07-21
暗淡的伤痕
分享资料个
通过车载倾角传感器对跷跷板倾角的高精度测量,实时的向控制系统反馈倾斜状态,系统根据跷跷板状态做出前进或后退动作,使跷跷板保持平衡及实现所要求的其他功能。为保证小车在板上平稳行使,以及从地面任意位置找到跷跷板起点,在小车的前后四角各安装了一对红外发射接收传感器,通过设定合适的光强和角度,可以探测板边界的位置,配合上软件分析引导小车行驶。
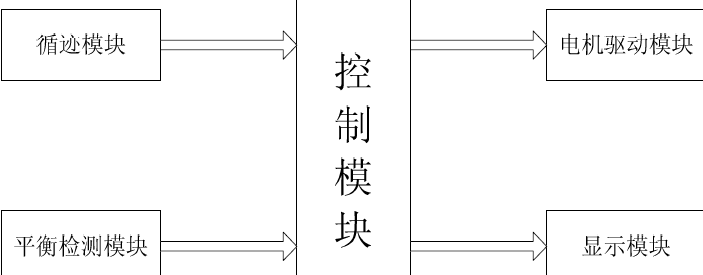
根据题目要求系统可分为五部分,分别为控制模块、光电检测模块、平衡检测模块、电机驱动模块、显示模块,如下图所
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




