
智能轮椅中关键技术的研究情况及发展趋势分析
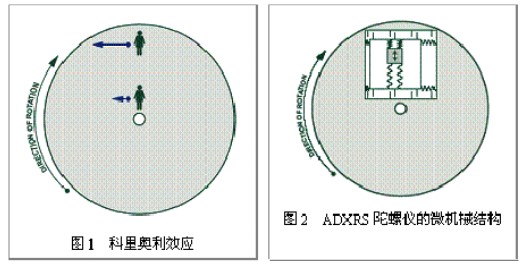
ADXRS角速度检测陀螺仪的原理和构造及电路设计实现
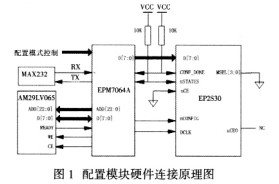
采用CPLD+FLASH方案的可重构配置方法
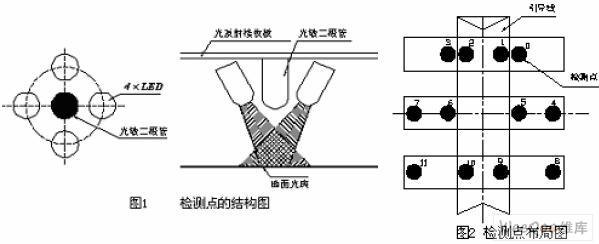
基于多传感器信息融合技术的自主式移动机器人导航系统设计
通过iTrax02的GPS接收机模块实现GPS数据导航系统设计
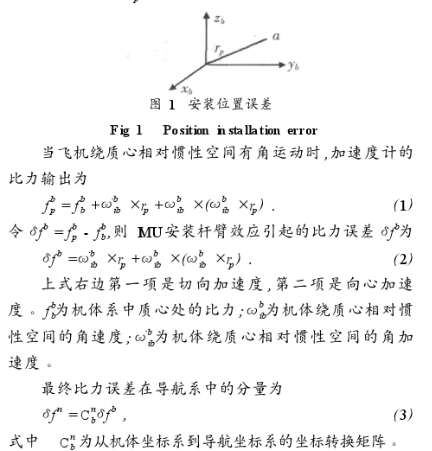
捷联式惯导系统的机载安装误差对导航精度的影响研究
电子地图在嵌入式设备上进行数据分块组织的方法分析
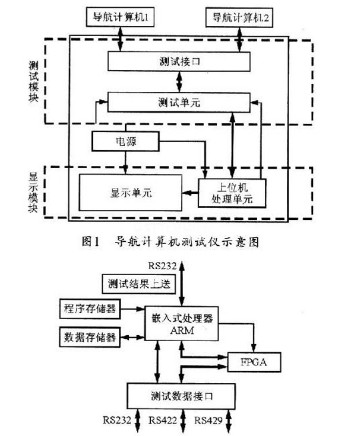
采用AT91RM9200处理器实现对两套导航计算机的测试设计
应用于导航接收机中的抗混叠滤波器设计
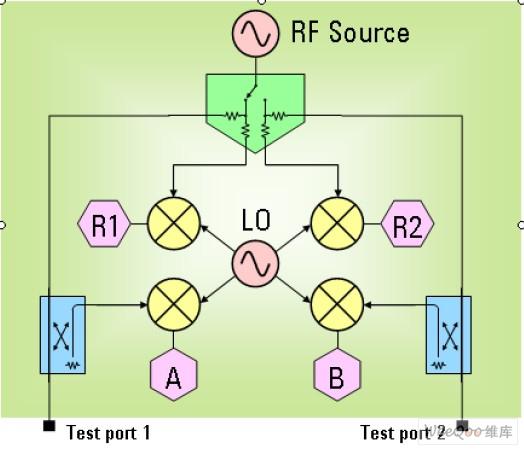
如何使用VNA来测试长延时器件
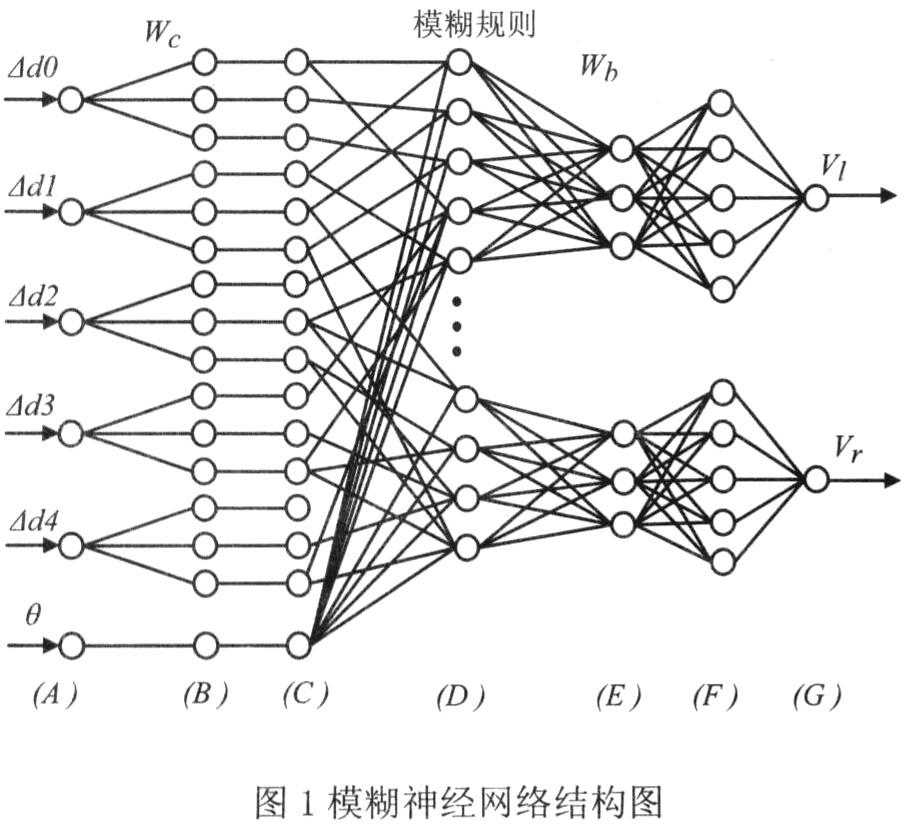
采用模糊神经网络进行移动机器人沿墙导航控制分析
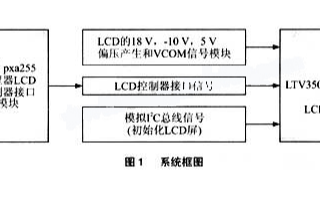
基于PXA255处理器和LTV350QV-F05实现GPS显示系统的设计
关于3D TOF飞行器的工作方式及在机器人导航方面的应用介绍
关于3D TOF机器人防撞和导航检测
相对地图和导航线在自动驾驶场景中是如何工作的?
向您介绍 Zilker Labs 电源导航软件的使用方式
FollowNet一个用于学习多模态导航策略的端到端的可微神经架构
AI的定位和导航类似于大脑的位置细胞和网格细胞
一种避免碰撞的算法—GA3C-CADRL分析

Apollo 2.5版基于相对地图的新导航模式

 下载APP
下载APP
 搜索内容
搜索内容
