一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架
如何通过激光雷达与摄影测量技术提高点云的精度和密度?
基于线段的激光雷达单目曲面重建
深度解析苹果dToF激光雷达模组技术
第一个大规模点云的自监督预训练MAE算法Voxel-MAE
基于非线性晶体的长波红外激光器应用发展
超构表面增强视场激光雷达概念设计
基于SiTime先进MEMS技术的新型汽车振荡器SiT9396/7简介
一种R3LIVE++的LiDAR惯性视觉融合框架
全面解析ADAS和自动驾驶的激光雷达、毫米波雷达原理
使用IMU与轮速计传感器进行雷达数据的运动畸变校正
UrbanScene3D大型数据集平台用于研究城市场景感知和重建
基于金字塔的激光雷达和摄像头深度融合网络
LT-mapper系统的原理和实现应用分析
LINS算法的框架与代码分析
激光雷达及其工作原理
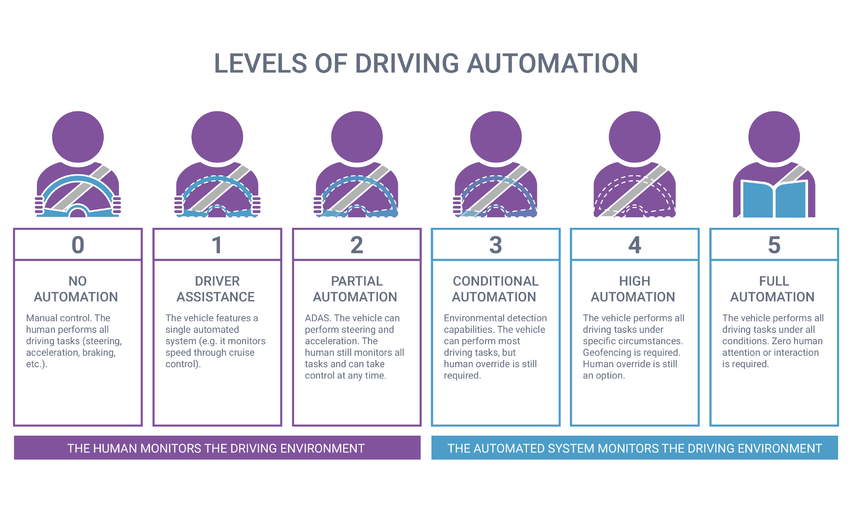
从L1到L5自动驾驶升级 三种关键传感器应该如何选?
无人机在输电线路巡检中发挥着越来越大的作用
智能驾驶激光雷达技术进展 激光雷达赛道开启量产元年
偏振为何能够实现三维成像?偏振三维成像的原理是什么

 下载APP
下载APP
 搜索内容
搜索内容
