
华为96系列激光雷达拆解分析
特斯拉的可扩展自动驾驶解决方案
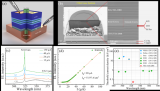
厦门大学张保平教授课题组发表绿光GaN基VCSEL重要成果

一文解析雷达、LiDAR和摄像头

自动驾驶纯视觉算法的上限在哪?
晶振在激光雷达系统中的作用
激光雷达与视觉感知的优劣对比

市场常见的自动驾驶算法对比
激光雷达与视觉感知的优劣对比
浅谈AGV/AMR领域的传感器解决方案

实现光子角动量的精确控制新技术
基于NeRF的实时激光雷达SLAM算法

探讨目前主流3D激光SLAM算法方案

机器人视觉—三维成像技术综述
RFID系统为AGV提供可靠定位解决方案

华为智能驾驶软件算法及硬件方案

自动驾驶系统的三大汽车传感器趋势!
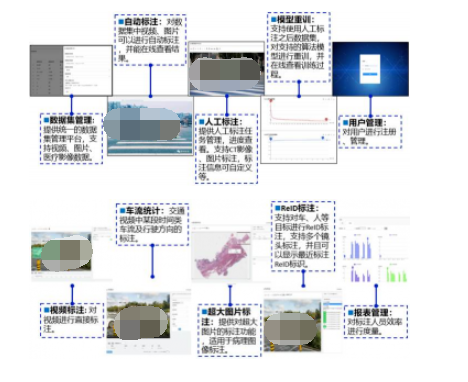
深度学习经典的自动标注软件介绍

自动驾驶的激光雷达和纯计算机视觉对比分析

基于激光雷达相机的在线外部标定算法

 下载APP
下载APP
 搜索内容
搜索内容
