
如何打造全方位的汽车功能安全

看看那些用树莓派打造的自动驾驶汽车!
从智驾平权到智驾兜底,自动驾驶行业风向为何转变?

太阳光模拟器 | 在汽车自动驾驶开发中的应用

恶劣工况下的ADAS多源传感器数据采集:从硬件抗干扰到算法泛化

如何制作一张自动驾驶高精度地图?

告别定位盲区!低成本组合导航系统ER-GNSS/MINS-05的实战能力

破解数据瓶颈:智能汽车合成数据架构与应用实践
优化导航系统中的MEMS IMU数据一致性和时序

康谋分享 | 物理级传感器仿真:破解自动驾驶长尾场景验证难题

什么是自动驾驶数据标注?如何好做数据标注?

康谋分享 | 基于多传感器数据的自动驾驶仿真确定性验证
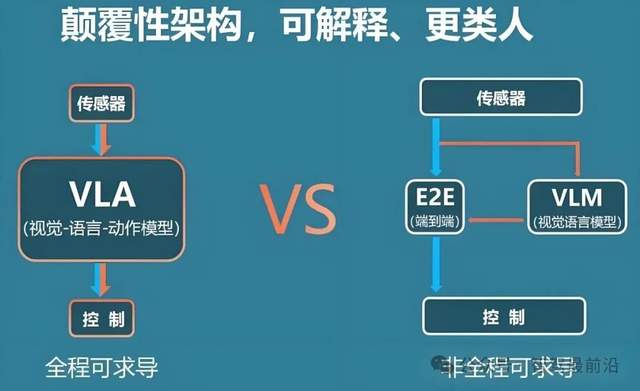
自动驾驶中常提的VLA是个啥?

自动驾驶毫米波雷达之间会相互干扰吗?

MPS MPM3695GPJ-20电源模块产品特性

Safety Pro汽车功能安全分析
如何为树莓派 FPV 战斗无人机构建自动驾驶仪的“眼睛”!
树莓派也能实现海上自动化驾驶?

康谋分享 | 特斯拉AD/ADAS紧急制动安全分析案例
方案分享 | ADAS时空融合数据采集方案

 下载APP
下载APP
 搜索内容
搜索内容
